Принцип действия двигателя – Электрический двигатель — принцип работы электромотора классификация и технические характеристики
- 23.03.2020
Принцип работы электродвигателя — устройство и отличия разных видов
Электродвигатели – это устройства, в которых электрическая энергия превращается в механическую. В основе принципа их действия лежит явление электромагнитной индукции.
Однако способы взаимодействия магнитных полей, заставляющих вращаться ротор двигателя, существенно различаются в зависимости от типа питающего напряжения – переменного или постоянного.
Устройство и принцип действия электродвигателя постоянного тока
В основе принципа работы электродвигателя постоянного тока лежит эффект отталкивания одноименных полюсов постоянных магнитов и притягивания разноименных. Приоритет ее изобретения принадлежит русскому инженеру Б. С. Якоби. Первая промышленная модель двигателя постоянного тока была создана в 1838 году. С тех пор его конструкция не претерпела кардинальных изменений.
В двигателях постоянного тока небольшой мощности один из магнитов является физически существующим. Он закреплен непосредственно на корпусе машины. Второй создается в обмотке якоря после подключения к ней источника постоянного тока. Для этого используется специальное устройство – коллекторно-щеточный узел. Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя. К нему подключены концы обмотки якоря.
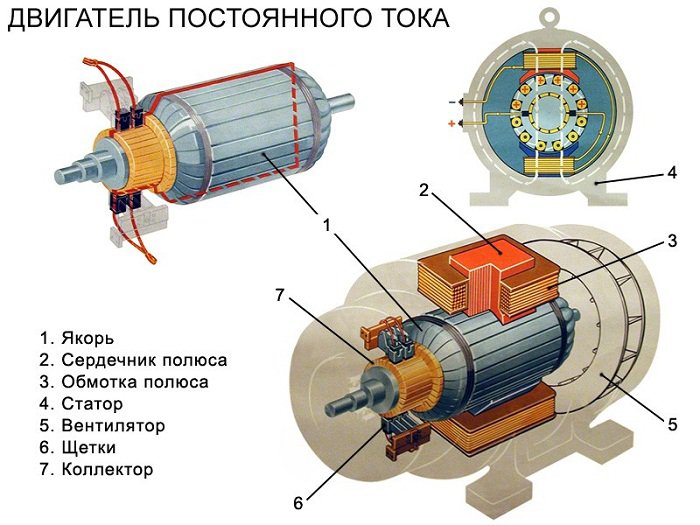
Чтобы возник вращающий момент, необходимо непрерывно менять местами полюса постоянного магнита якоря. Происходить это должно в момент пересечения полюсом так называемой магнитной нейтрали. Конструктивно такая задача решается разделением кольца коллектора на секторы, разделенные диэлектрическими пластинами. Концы обмоток якоря присоединяются к ним поочередно.
В двигателях большой мощности физически существующих магнитов не используют из-за их большого веса. Для создания постоянного магнитного поля статора используется несколько металлических стержней, каждый из которых имеет собственную обмотку из проводника, подключенного к плюсовой или минусовой питающей шине. Одноименные полюса включаются последовательно друг другу.
Количество пар полюсов на корпусе двигателя может быть равно одной или четырем. Число токосъемных щеток на коллекторе якоря должно ему соответствовать.
 Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Также существует три схемы подключения двигателя постоянного тока:
- с параллельным возбуждением;
- последовательным;
- смешанным.
Параллельное возбуждение – это когда параллельно обмотке якоря включается еще одна независимая, обычно регулируемая (реостат). Такой способ подключения позволяет очень плавно регулировать скорость вращения и достигать ее максимальной стабильности. Его используют для питания электродвигателей станков и кранового оборудования.
Последовательная – в цепь питания якоря дополнительная обмотка включена последовательно. Такой тип подключения используется для того, чтобы в нужный момент резко нарастить вращающее усилие двигателя. Например, при трогании с места железнодорожных составов.
Двигатели постоянного тока имеют возможность плавной регулировки частоты вращения, поэтому их применяют в качестве тяговых на электротранспорте и грузоподъемном оборудовании.
Двигатели переменного тока — в чем отличие?
 Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Вращающееся магнитное поле возникает в трех обмотках статора двигателя сразу, как только они подключаются к цепи питающего напряжения. Ротор такого электромотора в традиционном исполнении не имеет никаких обмоток и представляет собой, грубо говоря, кусок железа, чем-то напоминающий беличье колесо.
Магнитное поле статора провоцирует возникновение в роторе тока, причем очень большого, ведь это короткозамкнутая конструкция. Этот ток вызывает возникновение собственного поля якоря, которое «сцепляется» с вихревым магнитным потом статора и заставляет вращаться вал двигателя в том же направлении.
Магнитное поле якоря имеет ту же скорость, что и статора, но отстает от него по фазе примерно на 8–100. Именно поэтому двигатели переменного тока называются асинхронными.Принцип действия электродвигателя переменного тока с традиционным, короткозамкнутым ротором, имеет очень большие пусковые токи. Вероятно, многие из вас это замечали – при пуске двигателей лампы накаливания меняют яркость свечения. Поэтому в электрических машинах большой мощности применяется фазный ротор – на нем уложены три обмотки, соединенные «звездой».
Обмотки якоря не подключены к питающей сети, а посредством коллекторно-щеточного узла соединены с пусковым реостатом. Процесс включения такого двигателя состоит из соединения с питающей сетью и постепенного уменьшения до нуля активного сопротивления в цепи якоря. Электромотор включается плавно и без перегрузок.
Особенности использования асинхронных двигателей в однофазной цепи
 Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
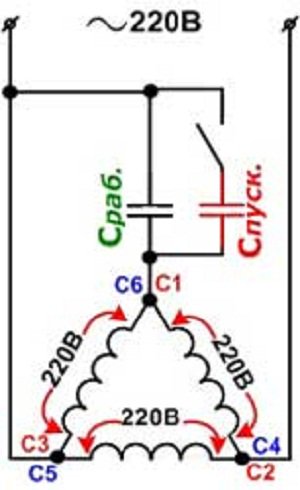
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого используется конденсатор.
Запитать от бытовой розетки можно и промышленный трехфазный двигатель. Для этого в его клеммной коробке две обмотки соединяются в одну, и в эту цепь включается конденсатор. Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Электродвигатели этого типа легко запускаются, но частоту их вращения практически невозможно регулировать.Они чувствительны к перепадам напряжения, а при «недогрузе» снижают коэффициент полезного действия, становясь источником непропорционально больших затрат электроэнергии. При этом существуют методы использования асинхронного двигателя как генератор.
Универсальные коллекторные двигатели — принцип работы и характеристики
 В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.В таких двигателях магнитное поле статора создается за счет питающего напряжения. Только немного изменена конструкция магнитопроводов – она не литая, а наборная, что позволяет уменьшать перемагничивание и нагрев токами Фуко. Последовательно включенная в цепь якоря индуктивность дает возможность менять направление магнитного поля статора и якоря в одном направлении и в той же фазе.
Практически полная синхронность магнитных полей позволяет двигателю набирать обороты даже при значительных нагрузках на валу, что и требуется для работы дрелей, перфораторов, пылесосов, «болгарок» или полотерных машин.
Если в питающую цепь такого двигателя включен регулируемый трансформатор, то частоту его вращения можно плавно менять. А вот направление, при питании от цепи переменного тока, изменить не удастся никогда.
Такие электромоторы способны развивать очень высокие обороты, компактны и имеют больший вращающий момент. Однако наличие коллекторно-щеточного узла снижает их моторесурс – графитовые щетки достаточно быстро истираются на высоких оборотах, особенно если коллектор имеет механические повреждения.Электродвигатели имеют самый большой КПД (более 80 %) из всех устройств, созданных человеком. Их изобретение в конце XIX века вполне можно считать качественным цивилизационным скачком, ведь без них невозможно представить жизнь современного общества, основанного на высоких технологиях, а чего-либо более эффективного пока еще не придумано.
Синхронный принцип работы электродвигателя на видео
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.

Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…

Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.

Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:

Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:

Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.

Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
 максимальный")
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.

Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.

Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.

Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:

Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.

Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.

Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.

Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.

Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.

Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
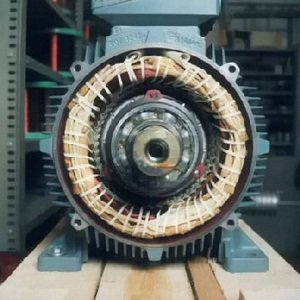
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
Недостатки
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Похожие темы:
Электродвигатель постоянного тока — Википедия
Электродвигатель постоянного тока (ДПТ) — электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
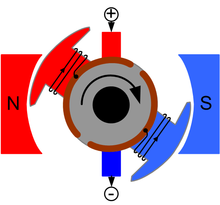 Схема электродвигателя с двумя обмотками электромагнита на якоре
Схема электродвигателя с двумя обмотками электромагнита на якоре 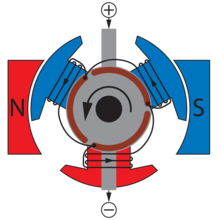 Схема электродвигателя с тремя обмотками электромагнита на якоре
Схема электродвигателя с тремя обмотками электромагнита на якореЭтот двигатель можно ещё назвать синхронной машиной постоянного тока с самосинхронизацией. Простейший двигатель, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), одного электромагнита с явно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками.
Простейший двигатель имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное). В этом случае крутящий момент равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)},
где s{\displaystyle s} — число витков обмотки ротора,
B{\displaystyle B} — индукция магнитного поля полюсов статора,
I{\displaystyle I} — ток в обмотке ротора [А],
L{\displaystyle L} — длина рабочей части витка обмотки [м],
r{\displaystyle r} — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
sin{\displaystyle \sin } — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
w{\displaystyle w} — угловая скорость [рад/сек],
t{\displaystyle t} — время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвуют в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
- n⋅α/(2⋅π){\displaystyle n\cdot \alpha /(2\cdot \pi )},
где n{\displaystyle n} — число щёток,
α{\displaystyle \alpha } — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s{\displaystyle s} рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1 оборот = 2π{\displaystyle 2\pi }):
- Mkrsr=(2⋅∫0πs⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=s⋅2⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
 Рис. 2 Коллекторный двухполюсный двигатель постоянного тока с тремя зубцами на роторе
Рис. 2 Коллекторный двухполюсный двигатель постоянного тока с тремя зубцами на ротореДвигатель, показанный на рис. 2, состоит из:
— одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой,
— ротора с тремя зубцами и, соответственно, с тремя обмотками (обмотки ротора при такой конструкции могут быть включены звездой (в столь маломощной машине условия коммутации допускают такое соединение) или треугольником),
— щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками.
Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухзубцовым ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы постоянного тока.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на асинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор (индуктор)[править | править код]
На статоре ДПТ располагаются, в зависимости от конструкции, или постоянные магниты (микродвигатели), или электромагниты с обмотками возбуждения (катушками, наводящими магнитный поток возбуждения).
В простейшем случае статор имеет два полюса, то есть один магнит с одной парой полюсов. Но чаще ДПТ имеют две пары полюсов. Бывает и более. Помимо основных полюсов на статоре (индукторе) могут устанавливаться добавочные полюса, которые предназначены для улучшения коммутации на коллекторе.
Ротор (якорь)[править | править код]
Минимальное число зубцов ротора, при котором самозапуск возможен из любого положения ротора — три. Из трёх, кажущихся явно выраженными, полюсов, на самом деле один полюс всё время находится в зоне коммутации, то есть ротор имеет минимум одну пару полюсов (как и статор, так как в противном случае работа двигателя невозможна).
Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание, в зависимости от угла поворота ротора, относительно статора. Применение большого числа (несколько десятков) катушек, необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, и для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его, в первом приближении, можно считать сплошным однородным цилиндром с моментом инерции, равным:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}},
где m{\displaystyle m} — масса цилиндра (ротора),
а R{\displaystyle R} — радиус цилиндра (ротора).
Коллектор[править | править код]
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции: является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
 Рис. 4 Графитовые щётки
Рис. 4 Графитовые щёткиЩёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов.
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора недопустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Принципу работы электродвигателя постоянного тока может быть дано два описания:
- 1. подвижная рамка (два стержня с замкнутыми концами) с током в магнитном поле статора
или
- 2. взаимодействие магнитных полей статора и ротора.
Рамка с током, в однородном магнитном поле полюсов статора с индукцией B{\displaystyle B}, на два стержня рамки длиной L{\displaystyle L}, и с током I{\displaystyle I}, действует сила Ампера F{\displaystyle F}, постоянной величины, равные:
- F=B⋅I⋅L{\displaystyle F=B\cdot I\cdot L} и направленные в противоположные стороны.
Эти силы прикладываются к плечам p{\displaystyle p}, равным:
- p=r⋅sin(w⋅t){\displaystyle p=r\cdot \sin(w\cdot t)}, где r{\displaystyle r} — радиус рамки;
и создают крутящий момент Mk{\displaystyle M_{k}}, равный:
- Mk=F⋅p=B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}=F\cdot p=B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Для двух стержней рамки, суммарный крутящий момент равен:
- Mks=2⋅Mk=2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}s=2\cdot M_{k}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Практически (из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta }, между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко) четыре небольших части под кривой крутящего момента, равные:
- 2⋅B⋅I⋅L⋅r⋅∫0δ/2sin(w⋅t)d(w⋅t){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}\sin(w\cdot t)d(w\cdot t)}, где δ=β−α{\displaystyle \delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s{\displaystyle s}, крутящий момент будет равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Наибольший крутящий момент будет при угле поворота рамки равном: π/2{\displaystyle \pi /2}, то есть при угле 90°.
При этом угле поворота рамки с током, вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, то есть под углом 90°. При угле поворота ротора (рамки) равном 180°, крутящий момент равен нулю (из-за нулевого плеча), но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента, делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=(2⋅∫0πB⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
При s{\displaystyle s} витков в обмотке:
- Mkrsr=s⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=s\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Две рамки с током в однородном магнитном поле полюсов статора[править | править код]
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π/2{\displaystyle \pi /2}, то получится четырёхполюсный ротор.
Момент второй рамки:
- Mc=2⋅B⋅I⋅L⋅r⋅sin(ωt+π/2)=2⋅B⋅I⋅L⋅r⋅cos(ωt){\displaystyle M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(\omega t+\pi /2)=2\cdot B\cdot I\cdot L\cdot r\cdot \cos(\omega t)}.
Суммарный момент обеих рамок:
- Mk=Ms+Mc=2⋅B⋅I⋅L⋅r⋅(sin(ωt)+cos(ωt)){\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot (\sin(\omega t)+\cos(\omega t))}.
Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta } (в радианах) между пластинами коллектора (ламелями), восемь небольших частей под кривой крутящего момента, равных:
- 2⋅B⋅I⋅L⋅r∫0Δ/2sin(ωt)⋅d(ωt){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\int \limits _{0}^{\Delta /2}\sin(\omega t)\cdot d(\omega t)}, где Δ=β−α{\displaystyle \Delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора[править | править код]
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону:
- B=Bm⋅sin(ω⋅t){\displaystyle B=B_{m}\cdot \sin(\omega \cdot t)},
то крутящий момент для одного стержня будет равен:
- M=Bm⋅sin(ω⋅t)⋅I⋅L⋅r⋅sin(ω⋅t)=Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M=B_{m}\cdot \sin(\omega \cdot t)\cdot I\cdot L\cdot r\cdot \sin(\omega \cdot t)=B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для двух стержней:
- Ms=2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для рамки из s{\displaystyle s} витков:
- Mss=s⋅2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}s=s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}}.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные:
- s⋅2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(ω⋅t))2d(ω⋅t).{\displaystyle s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(\omega \cdot t))^{2}d(\omega \cdot t).}
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=2⋅∫0πBm⋅I⋅L⋅r⋅(sin(ω⋅t))2d(ω⋅t)/(2⋅π)=Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t)/π{\displaystyle Mkrsr=2\cdot \int \limits _{0}^{\pi }B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}d(\omega \cdot t)/(2\cdot \pi )=B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t)/\pi }.
При s{\displaystyle s} витках в обмотке:
- Mkrsr=(s⋅Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t))/π{\displaystyle Mkrsr=(s\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t))/\pi }.
Две рамки с током в неоднородном магнитном поле полюсов статора[править | править код]
Для второй (косинусной) рамки:
- sin(w⋅t+π/2)=cos(w⋅t){\displaystyle \sin(w\cdot t+\pi /2)=\cos(w\cdot t)};
крутящий момент от второй (косинусной) рамки будет равен:
- Mc=2⋅Bm⋅I⋅L⋅r⋅(cos(w⋅t))2{\displaystyle M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\cos(w\cdot t))^{2}},
суммарный крутящий момент от обеих рамок равен:
- Mk=Ms+Mc=2⋅Bm⋅I⋅L⋅r⋅((sin(w⋅t))2+(cos(w⋅t))2)=2⋅Bm⋅I⋅L⋅r{\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot ((\sin(w\cdot t))^{2}+(\cos(w\cdot t))^{2})=2\cdot B_{m}\cdot I\cdot L\cdot r},
то есть постоянен, и от угла поворота ротора не зависит.
Практически из-за наличия зазора восемь небольших частей, под кривой крутящего момента, равные:
- 2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(w⋅t))2d(w⋅t){\displaystyle 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(w\cdot t))^{2}d(w\cdot t)} каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать, в первом приближении, сплошным однородным цилиндром с моментом инерции:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}}, где m{\displaystyle m} — масса цилиндра (ротора), R{\displaystyle R} — радиус цилиндра (ротора).
Взаимодействие магнитных полей[править | править код]
Необходимо отметить, что работа по вращению ротора (рамки с током) совершается не за счет энергии внешнего магнитного поля (поля статора), а за счет источника тока, поддерживающего неизменным ток в контуре рамки. При изменениях магнитного потока, пронизывающего контур (рамку с током) при вращении, в этом контуре возникает э.д.с. индукции, направленная противоположно э.д.с. источника тока. Следовательно, источник тока, кроме работы, затрачиваемой на выделение ленц-джоулева тепла, должен совершать дополнительную работу против э.д.с. индукции. Сам же процесс вращения происходит за счет силы Ампера, действующей на проводник с электрическим током, находящийся в магнитном поле. Правильное мнение, что ротор (рамка с током) приходит в движение за счет того, что его магнитное поле отталкивается от магнитного поля статора.
Все электродвигатели постоянного тока автоматически создают вращающий момент, равный моменту сопротивления на валу и при этом частота вращения устанавливается постоянной[1].
Предположим, что момент сопротивления Mr{\displaystyle M_{r}} возрос и стал больше момента вращения Md{\displaystyle M_{d}}. В соответствии с уравнением механики Md−Mr=JdΩdt{\displaystyle M_{d}-M_{r}=J{\frac {d\Omega }{dt}}} появляется отрицательное ускорение dΩdt<0{\displaystyle {\frac {d\Omega }{dt}}<0} и частота вращения якоря n=60Ω2π{\displaystyle n={\frac {60\Omega }{2\pi }}} начинает падать. Вместе с частотой вращения якоря падает противо-ЭДС E=CenΦ{\displaystyle E=C_{e}n\Phi }, а ток якоря I=U−ER{\displaystyle I={\frac {U-E}{R}}} и вращающий момент Md=CmΦI
Как работает двигатель постоянного тока ?
Дорогие мои читатели, начинаем разбирать темы августовского стола заказов (боже мой, как быстро летит время!). Сегодняшняя тема может быть мало кого заинтересует, зато если кого заинтересует, так это будет очень в пользу им. Слушаем trudnopisaka: Напишите пожалуйста понятно о устройстве электродвигателей постоянного тока. Можно на примере одного из типов. Ведь с одной стороны принцип работы очень простой, а с другой, если разобрать один из электродвигателей, то там много деталей, назначение которых не очевидно. А на сайтах в начале поисковой выдачи есть только название этих деталей, в лучшем случае. Планирую с детьми собрать простой электродвигатель, чтобы это помогло им в понимании техники и они не боялись ее осваивать.
Первый этап развития электродвигателя (1821-1832) тесно связан с созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую.
В 1821 году М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника. Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя.
Для второго этапа развития электродвигателей (1833-1860) характерны конструкции с вращательным движением якоря.
Томас Дэвенпорт — американский кузнец, изобретатель, в 1833 году сконструировал первый роторный электродвигатель постоянного тока, создал приводимую им в движение модель поезда. В 1837 году он получил патент на электромагнитную машину.
В 1834 году Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором реализовал принцип непосредственного вращения подвижной части двигателя. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Испытания различных конструкций электродвигателей привели Б. С. Якоби и других исследователей к следующим выводам:
- расширение применения электродвигателей находится в прямой зависимости от удешевления электрической энергии, т. е. от создания генератора, более экономичного, чем гальванические элементы;
- электродвигатели должны иметь по возможности малые габариты, большую мощность ибольший коэффициент полезного действия;
- этап в развитии электродвигателей связан с разработкой конструкций с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом.
Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешёвого источника электрической энергии — электромагнитного генератора постоянного тока.
В 1886 году электродвигатель постоянного тока приобрёл основные черты современной конструкции. В дальнейшем он всё более и более совершенствовался.
В настоящее время трудно представить себе жизнь человечества без электродвигателя. Он используется в поездах, троллейбусах, трамваях. На заводах и фабриках стоят мощные электрические станки. Электромясорубки, кухонные комбайны, кофемолки, пылесосы — всё это используется в быту и оснащено электродвигателями.
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта).
При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
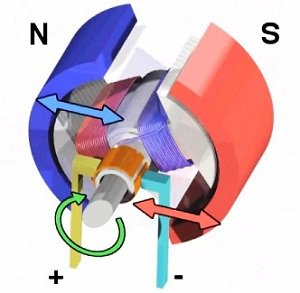
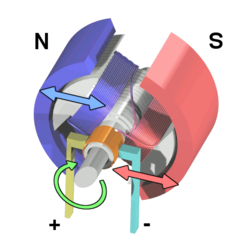
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
Индуктор (статор) электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах — специальная обмотка, служащая для улучшения условий коммутации.

Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя.
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка дегтя во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
Коллектор в электрических машинах выполняет роль выпрямителя переменного тока в постоянный (в генераторах) и роль автоматического переключателя направления тока во вращающихся проводниках якоря (в двигателях).
Когда магнитное поле пересекается только двумя проводниками, образующими рамку, коллектор будет представлять собой одно кольцо, разрезанное на две части, изолированные одна от другой. В общем случае каждое полукольцо носит название коллекторной пластины.
Начало и конец рамки присоединяются каждый к своей коллекторной пластине. Щетки располагаются таким образом, чтобы одна из них была всегда соединена с проводником, который будет двигаться у северного полюса, а другая — с проводником, который будет двигаться у южного полюса.
Рис. 2. Упрощенное изображения коллектора
Рис. 3. Выпрямление переменного тока с помощью коллектора
Сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда вращающаяся рамка займет положение, изображенное на рис. 3, А, в ее проводниках будет индуктироваться наибольший по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с коллекторной пластиной 2, поступит на щетку 4 и, пройдя внешнюю цепь, через щетку 3 возвратится в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Отсюда следует, что, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, произведенному коллектором, направление тока во внешней цепи не изменилось.
В следующий момент (положение Г), когда рамка вторично займет положение на нейтральной линии, в проводниках и, следовательно, во внешней цепи тока опять не будет.
В последующие моменты времени рассмотренный цикл движений будет повторяться в том же порядке. Таким образом, направление индуктированного направление тока во внешней цепи благодаря коллектору все время будет оставаться одним и тем же, а вместе с этим сохранится и полярность щеток.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов. При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.Конструкция двигателя может иметь один или несколько щеточно-коллекторных узлов.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. ВОТ ТУТ можно прочитать про него подробнее.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.

Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Принцип работы:
Сборка двигателя постоянного тока ПО ДЕТАЛЯМ:
Для любопытных могу еще подробно рассказать про Миф о торсионном генераторе или например что такое Золотое сечение и симметрия. Ну и совсем для жаждущих — подробно про Термоядерный реактор ITER. Оригинал статьи находится на сайте ИнфоГлаз.рф Ссылка на статью, с которой сделана эта копия — http://infoglaz.ru/?p=32677
Двигатель постоянного тока: описание принципа работы, типы
В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Описание и принцип работы
Электрические двигатели постоянного тока — это непрерывные приводы, которые преобразуют электрическую энергию в механическую. Двигатель постоянного тока достигает этого, создавая непрерывное угловое вращение, которое можно использовать для вращения насосов, вентиляторов, компрессоров, колес и т.д. Купить двигатель постоянного тока вы можете на Алиэкспресс:

Наряду с обычными роторными двигателями постоянного тока имеются также линейные двигатели, способные производить непрерывное движение вкладыша. Существуют в основном три типа обычных электрических двигателей: двигатели переменного тока, двигатели постоянного тока и шаговые двигатели.
Двигатели переменного тока, как правило, используются в однофазных или многофазных промышленных мощных установках, в которых постоянный крутящий момент и скорость требуются для управления большими нагрузками, такими как вентиляторы или насосы.

В этом уроке по электродвигателям мы рассмотрим только простые двигатели постоянного тока и шаговые двигатели, которые используются во многих различных типах электронных схем, систем позиционного управления, микропроцессоров, PIC и роботизированных схем.
Типы двигателей постоянного тока
Двигатель постоянного тока, является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется, что делает их идеальными для использования в устройствах, таких как регулирование скорости, управление сервоприводом и / или требуется позиционирование. Двигатель постоянного тока состоит из двух частей: «Статор», который является неподвижной частью, и «Ротор», который является вращающейся частью. В результате доступно три типа двигателей постоянного тока.
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов. Обычно моторы с щеткой постоянного тока дешевые, маленькие и легко управляемые.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему, и коммутация достигается с помощью электроники. Они, как правило, меньше, но дороже, чем обычные двигатели постоянного тока щеточного типа, потому что они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, но они имеют лучшие характеристики крутящего момента / скорости, более эффективны и имеют более длительный срок эксплуатации. чем эквивалентные коллекторные типы.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им, и в основном используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Коллекторный двигатель постоянного тока
Стандартный коллекторный двигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого статором, и внутренней части, которая вращается, создавая движение, называемое ротором или «арматурой» для машин постоянного тока.
Обмотка статора двигателя представляет собой электромагнитную цепь, которая состоит из электрических катушек, соединенных вместе в круговую конфигурацию для создания необходимого северного полюса, затем южного полюса, затем северного полюса и т.д., типа стационарной системы магнитного поля для вращения, в отличие от машин переменного тока, чье поле статора постоянно вращается с приложенной частотой. Ток, который течет в этих полевых катушках, известен как ток поля двигателя.
Эти электромагнитные катушки, которые формируют поле статора, могут быть электрически соединены последовательно, параллельно или вместе с ротором двигателя. Последовательно намотанный двигатель постоянного тока имеет обмотки статора, соединенные последовательно с ротором. Аналогично, двигатель постоянного тока с шунтирующим витком имеет свои обмотки возбуждения статора, соединенные параллельно с ротором, как показано ниже.

Ротор постоянного тока состоит из токонесущих проводников, соединенных вместе на одном конце с электрически изолированными медными сегментами, называемыми коммутатором. Коммутатор позволяет осуществлять электрическое подключение через угольные щетки (отсюда и название «щеточный» двигатель) к внешнему источнику питания при вращении ротора.
Установленное ротором магнитное поле пытается выровнять себя с полем статора, заставляя ротор вращаться вокруг своей оси, но не может выровняться из-за задержек коммутации. Скорость вращения двигателя зависит от силы магнитного поля роторов, и чем больше напряжение подается на двигатель, тем быстрее вращается ротор. Изменяя это приложенное постоянное напряжение, можно также изменять частоту вращения двигателя.

Двигатель постоянного тока с щеточным постоянным магнитом (PMDC), как правило, намного меньше и дешевле, чем его эквивалентные родственники двигателя постоянного тока с обмоткой статора, поскольку они не имеют обмотки возбуждения. В двигателях с постоянными магнитами постоянного тока (PMDC) эти полевые катушки заменяются сильными магнитами типа редкоземельных элементов (например, самарий-коболт или неодим-железо-бор), которые имеют очень сильные магнитные энергетические поля.
Использование постоянных магнитов дает двигателю постоянного тока намного лучшую линейную характеристику скорости / крутящего момента, чем эквивалентные намотанные двигатели из-за постоянного и иногда очень сильного магнитного поля, что делает их более подходящими для использования в моделях, робототехнике и сервоприводах.
Хотя щеточные электродвигатели постоянного тока очень эффективны и дешевы, проблемы, связанные с щеточным электродвигателем постоянного тока, заключаются в том, что искрение возникает в условиях большой нагрузки между двумя поверхностями коммутатора и угольных щеток, что приводит к самогенерированию тепла, короткому сроку службы и электрическому шуму из-за искрения, что может повредить любое полупроводниковое коммутационное устройство, такое как МОП-транзистор или транзистор. Чтобы преодолеть эти недостатки, были разработаны бесщеточные или бесколлекторные двигатели постоянного тока.
Бесколлекторный двигатель постоянного тока
Бесщеточный (бесколлекторный) двигатель постоянного тока (BDCM) очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора. Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей. Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Тогда конструкция бесщеточного двигателя постоянного тока очень похожа на двигатель переменного тока, что делает его истинным синхронным двигателем, но одним недостатком является то, что он дороже, чем аналогичная конструкция «щеточного» двигателя.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Самым распространенным датчиком положения / полюса является «Датчик Холла», но некоторые двигатели также используют оптические датчики.
При использовании датчиков с эффектом Холла полярность электромагнитов переключается с помощью схемы управления двигателем. Тогда двигатель можно легко синхронизировать с цифровым тактовым сигналом, обеспечивая точное управление скоростью. Бесщеточные двигатели постоянного тока могут быть сконструированы так, чтобы иметь внешний ротор с постоянными магнитами и внутренний статор электромагнита или внутренний ротор с постоянными магнитами и внешний статор электромагнита.
Преимущества бесщеточного двигателя постоянного тока по сравнению с его «щеточным» кузеном заключаются в более высокой эффективности, высокой надежности, низком электрическом шуме, хорошем контроле скорости и, что более важно, отсутствии износа щеток или коммутатора, что обеспечивает значительно более высокую скорость. Однако их недостатком является то, что они более дороги и сложнее в управлении.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
Блок-схема серводвигателя постоянного тока

Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.

Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Контроль скорости двигателя

Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:

и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).
Изменение направления движения двигателя постоянного тока
Хотя управление скоростью двигателя постоянного тока с помощью одного транзистора имеет много преимуществ, оно также имеет один главный недостаток: направление вращения всегда одинаковое, это «однонаправленная» схема. Во многих случаях нам необходимо управлять двигателем в обоих направлениях вперед и назад.
Для управления направлением двигателя постоянного тока необходимо поменять полярность питания постоянного тока, подаваемого на соединения двигателя, чтобы его вал вращался в противоположном направлении. Один очень простой и дешевый способ управления направлением вращения двигателя постоянного тока состоит в использовании различных переключателей, расположенных следующим образом:

В первом контуре используется одинарный двухполюсный, двухходовый переключатель (DPDT) для контроля полярности соединений двигателей. При переключении контактов подача на клеммы двигателя изменяется, и двигатель меняет направление. Второй контур немного сложнее и использует четыре однополюсных, одноходовых (SPST) переключателя, расположенных в «H» -конфигурации.
Механические переключатели расположены в виде пары переключений и должны работать в определенной комбинации для работы или остановки двигателя постоянного тока. Например, комбинация переключателей A + D управляет вращением вперед, в то время как переключатели B + C управляют вращением назад, как показано на рисунке. Комбинации переключателей A + B или C + D замыкают клеммы двигателя, вызывая его быстрое торможение. Тем не менее, использование переключателей таким образом имеет свои опасности, так как рабочие переключатели A + C или B + D вместе отключат источник питания.
В то время как две вышеупомянутые схемы будут очень хорошо работать для большинства небольших двигателей постоянного тока, мы действительно хотим использовать различные комбинации механических переключателей только для изменения направления вращения двигателя, НЕТ! Мы могли бы изменить ручные переключатели для набора электромеханических реле и иметь одну кнопку прямого или обратного хода или даже использовать твердотельный четырехпозиционный двусторонний переключатель CMOS 4066B.
Но еще один очень хороший способ достижения двунаправленного управления двигателем (а также его скоростью) состоит в том, чтобы подключить двигатель к схеме транзисторного типа H-моста, как показано ниже.
H-мостовая схема двигателя

Схема H-моста, приведенная выше, названа так потому, что базовая конфигурация четырех переключателей, либо электромеханических реле, либо транзисторов, напоминает букву «H» с двигателем, расположенным на центральной шине. Транзистор или МОП-транзистор является, вероятно, одним из наиболее часто используемых типов двунаправленных цепей управления двигателем постоянного тока. Он использует «комплементарные пары транзисторов» как NPN, так и PNP в каждой ветви, причем транзисторы попарно объединяются для управления двигателем.
Управляющий вход A управляет двигателем в одном направлении, т.е. вращением вперед, в то время как вход B управляет двигателем в другом направлении, т.е. обратным вращением. Затем переключение транзисторов «ВКЛ» или «ВЫКЛ» в их «диагональных парах» приводит к направленному управлению двигателем.
Например, когда транзистор TR1 включен, а транзистор TR2 выключен, точка A подключена к напряжению питания (+ Vcc), а если транзистор TR3 выключен, а транзистор TR4 включен, точка B подключена к 0 вольт (GND). Затем двигатель будет вращаться в одном направлении, соответствующем положению клеммы А двигателя и положительной клемме В двигателя.
Если состояния переключения меняются местами так, что TR1 — «ВЫКЛ», TR2 — «ВКЛ», TR3 — «ВКЛ» и TR4 — «ВЫКЛ», ток двигателя будет течь в противоположном направлении, вызывая вращение двигателя в противоположном направлении.
Затем, применяя противоположные логические уровни «1» или «0» к входам A и B, направление вращения двигателя можно регулировать следующим образом.
Таблица истинности H-моста
| Вход А | Вход B | Функция двигателя |
| TR1 и TR4 | TR2 и TR3 | |
| 0 | 0 | Двигатель остановлен (OFF) |
| 1 | 0 | Мотор вращается вперед |
| 0 | 1 | Мотор вращается задним ходом |
| 1 | 1 | НЕ ПОЛОЖЕНО |
Важно, чтобы никакая другая комбинация входов не допускалась, так как это может привести к короткому замыканию источника питания, то есть оба транзистора, TR1 и TR2, были включены в одно и то же время (предохранитель = взрыв!).
Как и в случае однонаправленного управления двигателем постоянного тока, как показано выше, скорость вращения двигателя также можно регулировать с помощью широтно-импульсной модуляции или ШИМ. Затем, комбинируя переключение Н-моста с ШИМ-управлением, можно точно контролировать направление и скорость двигателя.
Имеющиеся в продаже готовые ИС- декодеры, такие как четырехполупроводниковая ИС H-моста SN754410 или L298N с двумя H-мостами, доступны со всей необходимой встроенной логикой управления и безопасности, специально разработанные для двунаправленных цепей управления двигателем H-моста.
как он устроен и работает
 Электрический двигатель представляет собой особый преобразователь. Это машина, где электрическая энергия преобразуется и переходит в механическую. Принцип действия двигателя основан на электромагнитной индукции. Есть к тому же и электростатические двигатели. Можно без особых дополнений использовать двигатели на других принципах преобразования электричества в перемещении. Но немногие знают, как устроен и как работает электродвигатель.
Электрический двигатель представляет собой особый преобразователь. Это машина, где электрическая энергия преобразуется и переходит в механическую. Принцип действия двигателя основан на электромагнитной индукции. Есть к тому же и электростатические двигатели. Можно без особых дополнений использовать двигатели на других принципах преобразования электричества в перемещении. Но немногие знают, как устроен и как работает электродвигатель.
Принцип работы устройства
В составе электродвигателя переменного тока присутствуют неподвижные и подвижные части. К первым относят:
- статор;
- индуктор.
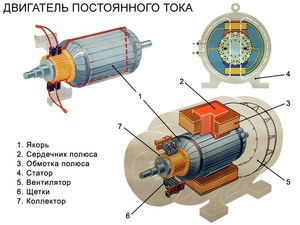 Статор находит применение для машин синхронного и асинхронного типа. Индуктор эксплуатируется в машинах постоянного тока. Подвижная часть состоит из ротора и якоря. Первый применяют для синхронных и асинхронных устройств, тогда как якорь используется для оборудования с постоянными показателями. Функция индуктора лежит на двигателях небольшой мощности. Здесь нередко используют постоянные магниты.
Статор находит применение для машин синхронного и асинхронного типа. Индуктор эксплуатируется в машинах постоянного тока. Подвижная часть состоит из ротора и якоря. Первый применяют для синхронных и асинхронных устройств, тогда как якорь используется для оборудования с постоянными показателями. Функция индуктора лежит на двигателях небольшой мощности. Здесь нередко используют постоянные магниты.
Говоря о том, как устроен электродвигатель, необходимо определить, к какому классу оборудования относится конкретная модель. В конструкции асинхронного двигателя ротор бывает:
- короткозамкнутым;
- фазным, то есть с обмоткой.
Последний тип используется, если требуется уменьшить пусковой ток и 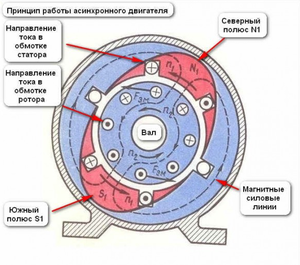 отрегулировать частоту вращения асинхронного электродвигателя. Обычно речь идет о крановых электродвигателях, повсеместно используемых в крановых установках.
отрегулировать частоту вращения асинхронного электродвигателя. Обычно речь идет о крановых электродвигателях, повсеместно используемых в крановых установках.
Кран обладает подвижностью и применяется в машинах постоянного тока. Это может быть генератор либо двигатель, а также универсальный двигатель, функционирующие по тому же принципу. Его используют в электроинструменте. Фактически универсальный двигатель — это тот же двигатель с постоянными показателями, в котором происходит последовательное возбуждение. Отличие касается лишь расчётов обмоток. Здесь отсутствует реактивное сопротивление. Оно бывает:
- емкостным;
- индуктивным.
Вот почему любой электроинструмент, если из него извлекается электронный блок, сможет работать и на постоянном токе. Но при этом напряжение в сети будет меньше. Принцип действия электродвигателя определяется сообразно тому, из каких компонентов он состоит и для каких целей предназначается.
Работа трехфазного асинхронного двигателя
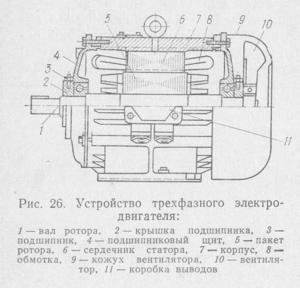 Во время включения в сеть формируется вращающееся магнитное поле. Оно отмечается в статоре и проникает через короткозамкнутую обмотку ротора. В ней переходит в индукцию. После этого, в соответствии с законом Ампера, ротор начинает вращаться. Частота перемещения этого элемента зависит от частоты питающего напряжения и количества магнитных полюсов, представленных парами.
Во время включения в сеть формируется вращающееся магнитное поле. Оно отмечается в статоре и проникает через короткозамкнутую обмотку ротора. В ней переходит в индукцию. После этого, в соответствии с законом Ампера, ротор начинает вращаться. Частота перемещения этого элемента зависит от частоты питающего напряжения и количества магнитных полюсов, представленных парами.
Разность между частотой вращения ротора и магнитного поля статора выражается в виде скольжения. Двигатель именуют асинхронным, потому что частота вращения магнитного поля у него сообразна с частотой вращения ротора. Синхронный двигатель имеет отличия в конструкции. Ротор дополняется магнитом постоянного типа либо электромагнитом. В нём имеются элементы, такие как для запуска беличья клетка и постоянные магниты. Также их роль могут выполнять электромагниты.
 В асинхронном двигателе у магнитного поля статора частота вращения совпадает с аналогичным показателем у ротора. Для включения используют асинхронные электродвигатели вспомогательного типа либо ротор с короткозамкнутой обмоткой. Асинхронные двигатели смогли найти широкое применение во всех технических областях.
В асинхронном двигателе у магнитного поля статора частота вращения совпадает с аналогичным показателем у ротора. Для включения используют асинхронные электродвигатели вспомогательного типа либо ротор с короткозамкнутой обмоткой. Асинхронные двигатели смогли найти широкое применение во всех технических областях.
Особенно это актуально в отношении трехфазных двигателей, характеризующихся простотой конструкции. Они не только доступны по цене, но и надежнее в сравнении с электрическими. Ухода они не требуют почти никакого. Название асинхронный, присвоенное им, обусловлено несинхронным вращением ротора в таком двигателе. Если отсутствует трехфазная сеть, такой двигатель может включаться в сеть однофазного тока.
В составе статора асинхронного электродвигателя присутствует пакет. В нём имеются лакированные листы электротехнической стали, чья толщина составляет 0,5 мм. У них есть пазы, куда уложена обмотка. Три фазы обмотки соединены друг с другом треугольником или звездой, которые смещены на 120 градусов пространственно.
 Если речь идет о роторе электродвигателя, в котором имеются контактные кольца в пазах, здесь отмечается ситуация, похожая на обмотку статора. Это актуально, если он включён звездой либо начальные концы фаз соединены тремя контактными кольцами, зафиксированными на валу. Когда двигатель запущен, можно подключить реостат на фазы обмотки для контроля частоты вращения. После успешного разбега контактные кольца коротко замыкаются, а потому обмотка ротора выполняет те же функции, что и в случае с короткозамкнутым изделием.
Если речь идет о роторе электродвигателя, в котором имеются контактные кольца в пазах, здесь отмечается ситуация, похожая на обмотку статора. Это актуально, если он включён звездой либо начальные концы фаз соединены тремя контактными кольцами, зафиксированными на валу. Когда двигатель запущен, можно подключить реостат на фазы обмотки для контроля частоты вращения. После успешного разбега контактные кольца коротко замыкаются, а потому обмотка ротора выполняет те же функции, что и в случае с короткозамкнутым изделием.
Современная классификация
 По принципу формирования вращающего момента двигатели электрического типа делят на магнитоэлектрические и гистерезисные. Последняя группа отличается тем, что вращающий момент здесь формируется вследствие гистерезиса при чрезмерном намагничивании ротора. Такие двигатели не считаются классическими и не так распространены в промышленности. Наибольшее распространение получили магнитоэлектрические модификации, которые делятся на две большие группы, согласно потребляемой энергии. Это двигатели переменного и постоянного тока. Выпускаются также универсальные модели, которые способны питаться обоими видами электрического тока.
По принципу формирования вращающего момента двигатели электрического типа делят на магнитоэлектрические и гистерезисные. Последняя группа отличается тем, что вращающий момент здесь формируется вследствие гистерезиса при чрезмерном намагничивании ротора. Такие двигатели не считаются классическими и не так распространены в промышленности. Наибольшее распространение получили магнитоэлектрические модификации, которые делятся на две большие группы, согласно потребляемой энергии. Это двигатели переменного и постоянного тока. Выпускаются также универсальные модели, которые способны питаться обоими видами электрического тока.
Основные особенности
 Было бы правильно называть эти устройства электрическими нефазными. Это обусловлено тем, что фазы переключаются здесь непосредственно в двигателе. За счет этого мотор питается постоянным, как и переменным типами тока, с одинаковым успехом. Эта группа делится по способу переключения фаз и присутствию обратной связи. Они бывают вентильными и коллекторными.
Было бы правильно называть эти устройства электрическими нефазными. Это обусловлено тем, что фазы переключаются здесь непосредственно в двигателе. За счет этого мотор питается постоянным, как и переменным типами тока, с одинаковым успехом. Эта группа делится по способу переключения фаз и присутствию обратной связи. Они бывают вентильными и коллекторными.
Что касается типа возбуждения, коллекторные двигатели подразделяют на модели с самовозбуждением, моторы с независимым возбуждением от постоянных магнитов и электромагнитов. Первый тип, в свою очередь, классифицируется на моторы с последовательным, параллельным, смешанным возбуждением.
Бесколлекторные, или вентильные изделия, работают от электричества. В них переключение фаз происходит посредством специального электроблока, носящего название инвертора. Процесс этот может оснащаться обратной связью, когда пускают в ход датчик положения ротора либо без обратной связи. Такое устройство можно фактически позиционировать, как аналог асинхронного устройства.
Агрегаты пульсирующего тока
 Такой двигатель является электрическим, и питание у него осуществляется пульсирующим электротоком. Конструкционные особенности его схожи с аналогичными особенностями у устройств постоянного тока. Конструктивные отличия его от двигателя с постоянными показателями состоят в присутствии шихтованных вставок для выпрямления переменного тока. Используют его на электровозах со специальными установками. Характерной особенностью является наличие компенсационной обмотки и значительного количества пар полюсов.
Такой двигатель является электрическим, и питание у него осуществляется пульсирующим электротоком. Конструкционные особенности его схожи с аналогичными особенностями у устройств постоянного тока. Конструктивные отличия его от двигателя с постоянными показателями состоят в присутствии шихтованных вставок для выпрямления переменного тока. Используют его на электровозах со специальными установками. Характерной особенностью является наличие компенсационной обмотки и значительного количества пар полюсов.
Модификации переменного тока
 Двигатель представляет собой устройство, питание которого происходит с переменным током. Агрегаты эти бывают асинхронными и синхронными. Различие состоит в том, что в асинхронных машинах магнитодвижущая сила статора перемещается со скоростью вращения ротора. У асинхронного оборудования всегда наблюдается разница между скоростью вращения магнитного поля и ротора.
Двигатель представляет собой устройство, питание которого происходит с переменным током. Агрегаты эти бывают асинхронными и синхронными. Различие состоит в том, что в асинхронных машинах магнитодвижущая сила статора перемещается со скоростью вращения ротора. У асинхронного оборудования всегда наблюдается разница между скоростью вращения магнитного поля и ротора.
Синхронный электродвигатель работает от переменного тока. Ротор здесь вращается сообразно движению магнитного поля питающего напряжения. Синхронные электродвигатели делятся на модификации с обмотками возбуждения, с постоянными магнитами, а также на реактивные модификации, гистерезисные, шаговые, гибридные реактивные типы устройств.
Выделяют и так называемый реактивно-гистерезисный тип. Выпускают также модели с шаговыми агрегатами. Здесь определённое положение ротора фиксируется подачей питания на определенные зоны обмотки. Переход в другое положение достигается посредством снятия напряжения с одних обмоток и перемещения его в другие области. Вентильные реактивные модели электрического типа формируют питание обмоток посредством полупроводниковых элементов. Асинхронное устройство имеет частоту вращения ротора, отличную от частоты вращающегося магнитного поля. Она создается питающим напряжением. Такие модели получили на сегодня наибольшее распространение.
Универсальное коллекторное оборудование
Такой агрегат может работать на переменном и постоянном токе. Изготавливают его с последовательной обмоткой возбуждения при показателях мощности до 200 Вт. Статор выполняется из особой электротехнической стали. Обмотка возбуждения осуществляется при постоянном показателе напряжения полностью и частично при переменном показателе. Номинальное напряжение для переменного электротока составляют 127 и 220 В, аналогичные показатели для постоянного параметра равны 110 и 220 В. Находят применение в электроинструментах и бытовых аппаратах.
То, как работает электродвигатель, зависит от его принадлежности к тому или иному типу оборудования. Модификации переменного тока с питанием от промышленной сети 50 Гц не дают получить частоту вращения больше 3000 оборотов в минуту. Вот почему для получения значительных частот используют коллекторный мотор электрического типа. Он к тому же легче и меньше по размерам, нежели устройства с переменными показателями с аналогичной мощностью.
В их отношении используют специальные передаточные механизмы, преобразующие кинематические параметры механизма до приемлемых. При использовании преобразователей частоты и при наличии сети повышенной частоты двигатели переменного тока легче и меньше коллекторных изделий.
Ресурс асинхронных моделей с переменными показателями значительно выше, нежели у коллекторных. Определяется он состоянием подшипников и особенностями обмоточной изоляции.
Синхронный двигатель, у которого есть датчик положения ротора и инвертор, считается электронным аналогом коллекторного двигателя постоянного тока. Фактически он является коллекторным электродвигателем с последовательно включенными обмотками статора. Они идеально оптимизированы для работы с бытовой электросетью. Такую модель, независимо от полярности напряжения, можно вращать в одну сторону, так как последовательное соединение обмоток и ротора гарантирует смену полюсов из магнитных полей. Соответственно, результат остается направленным в одну сторону.
Статор из магнитного мягкого материала применим для работы на переменном токе. Это возможно, если сопротивление в перемагничивании у него незначительное. Чтобы снизить потери на вихревые токи, статор делают из изолированных пластин. Он получается наборным. Его особенностью является то, что потребляемый ток ограничивается за счёт индуктивного сопротивления обмоток. Соответственно, момент двигателя оценочно становится максимальным и варьируется от 3 до 5. Чтобы приблизить к механическим характеристикам двигатели общего назначения, применяются секционные обмотки. Они имеют отдельные выводы.
Примечательно, что для передвижения некоторыми видами бактерий используется электродвигатель из нескольких белковых молекул. Он способен трансформировать энергию электрического тока в форме движения протонов во вращении жгутика.
Синхронная модель возвратно-поступательного движения работает таким образом, что подвижная часть устройства оснащена постоянными магнитами. Они зафиксированы на шторке. Посредством неподвижных элементов постоянные магниты находятся под воздействием магнитного поля и проводят перемещение штока возвратно-поступательным методом.