Как передается крутящий момент на передний привод – Переднеприводные автомобили – что следует знать владельцу? + видео » АвтоНоватор
- 21.08.2018
Переднеприводные автомобили – что следует знать владельцу? + видео » АвтоНоватор
Выбирая себе машину, довольно часто можно наткнуться на переднеприводные автомобили, например, ВАЗ. Каковы же особенности данной конструкции, какие еще фирмы отдают ей предпочтение и почему?
Первый переднеприводный автомобиль и современные представители
В таком авто крутящий момент, который создается движком, передается на передние колеса, другими словами, они являются ведущими. На сегодняшний день практически каждый производитель имеет в своем списке авто с таким устройством: это Mercedes, Audi, Renault, Skoda, Citroen, Volkswagen, Peugeot, Toyota, в общем, этот перечень можно продолжать очень долго. И все эти автомобили нам хорошо знакомы и ежедневно встречаются на улицах города.

Первый переднеприводный автомобиль был создан еще в 1897 году братьями Грэф. Данный эффект достигался за счет самых обыкновенных карданных шарниров, которые располагались на каждой оси. Это был первый пробный вариант, далее свое развитие такой тип привода обрел уже в 1920 году в США при сборке гоночных автомобилей.

Сегодня самым мощным переднеприводным автомобилем, имеющим серийное производство, смело можно назвать Ford Focus. Его мощность достигает 305 л.с., а крутящий момент целых 440 Нм.
Как устроена трансмиссия переднеприводного автомобиля?
Трансмиссия переднеприводного автомобиля состоит из следующих основных частей: коробки передач, которая обеспечивает перераспределение и передачу крутящего момента и мощности к колесам; сцепления, благодаря которому отсутствует либо возникает связь между КП и непосредственно двигателем; и приводных валов.

Одним из важнейших элементов трансмиссии является дифференциал переднеприводного автомобиля, который расположен в КПП вместе с главной передачей. Он необходим, для того чтобы изменять, предавать и распределять крутящие моменты между потребителями, а также в случае необходимости обеспечить их вращение с различными угловыми скоростями.

Кроме того, отличительной особенностью устройства данных авто является и наличие шарниров равных угловых скоростей, посредством которых обеспечивается передача крутящего момента к передним колесам от дифференциала. Чаще всего, используется четыре шарнира, два внутренних, прикрепленных к дифференциалу, и два внешних, расположенных на колесах. Между данными ШРУСами находятся приводные валы.
Переднеприводные автомобили – особенности поведения
К главным преимуществам таких машин можно отнести следующие факты:
- устройство переднеприводного автомобиля предполагает отсутствие карданного вала, что значительно увеличивает используемую площадь салона;
- себестоимость производства значительно ниже, чем в случае с классической компоновкой;
- небольшое количество узлов привода самым наилучшим образом сказывается на потерях энергии и его надежности;
- более эффективное торможение.

Но, несмотря на столь явные преимущества, стоит отметить и некоторые недостатки:
- прохождение поворотов на переднеприводном автомобиле может быть несколько затрудненно, так как углы поворотов колес ограничиваются шарнирами;
- резкий разгон может привести к пробуксовке колес, при этом тяга движка реализуется в значительно меньшей степени, чем у задне- и полноприводных авто;
- возможен занос задней оси переднеприводного автомобиля во время гололеда, а также при мокром дорожном покрытии, хотя выровнять ее все же легче, чем у заднеприводного;
- в некоторых условиях во время добавления газа на руль может передаваться реактивное усилие, конечно же, из рук он не вырвется, однако дергаться будет довольно сильно;
- малое сцепное усилие ведущих колес не самым лучшим образом влияет на проходимость, особенно на подъемах. В этом случае первыми застревают именно передние колеса, и тогда авто становится совершенно беспомощным. Владельцы же заднеприводных машин в этом случае всегда могут дать задний ход и исправить ситуацию.

Однако, несмотря на возможный занос переднеприводных автомобилей и остальные их недостатки, именно они являются наиболее востребованными и часто выпускаемыми моделями.
Дифференциал: распределяем крутящий момент
В конструкции трансмиссии любого автомобиля обязательно присутствует такой составной узел как дифференциал авто. Этот элемент очень важен и выполняет ряд функций, без которых передвижение на авто и его управление было бы очень затруднительным.
Трансмиссия обеспечивает передачу крутящего момента от ДВС на колеса ведущей оси. Но поскольку условия передвижения могут быть самыми различными, необходимо обеспечить распределение подающегося вращения по колесным осям. То есть, нужно сделать так, чтобы колеса приводной оси могли крутиться с разными скоростями.
Если бы приводные колеса были связаны между собой жестко (объединены одной осью), то при определенных условиях возникала бы пробуксовка. Так, при вхождении в поворот колеса перемещаются по разным радиусам, что сказывается на пути, который каждое из них должно пройти. Колесо, перемещающееся по внутреннему радиусу, должно преодолеть значительно меньшее расстояние, чем-то, что идет по внешнему. Жесткая связка колес приведет к тому, что внутреннее колесо будет просто пробуксовывать, поскольку его скорость вращения больше, чем нужна для преодоления пути. А это в свою очередь обеспечивает повышение нагрузки на элементы трансмиссии, ухудшает управляемость, приводит к интенсивному износу шин.
Устранить этот негативный фактор и позволяет дифференциал. Этот узел обеспечивает передачу момента по полуосям, а также крутиться им с различной угловой скоростью.
Принцип работы
Для примера рассмотрим принцип работы самого распространенного типа дифференциала – конического. Состоит такой узел из корпуса, шестеренок, закрепленных на полуосях, а также сателлитов.
Устройство симметричного конического дифференциала
Компоновка дифференциала такая – корпус зафиксирован на ведомом шестеренчатом колесе главной передачи. Внутри него на жестко закрепленных осях расположены сателлиты. Полуоси, передающие вращение на колеса, своими концами заходят в корпус. Полуосевые шестеренки имеют постоянное зацепление с шестернями-сателлитами. В общем, все достаточно просто.
Сателлиты имеют две степени движения. Они зафиксированы на осях в корпусе, поэтому и вращаются вместе с ведомым шестеренчатым колесом главной передачи. Также они могут крутиться и вокруг своей оси.
При прямолинейном передвижении колеса ведущей оси испытывают одинаковое сопротивление, поэтому момент делится по полуосям равномерно. Сателлиты в этом случае вращаются лишь с корпусом, а относительно своих осей они неподвижны.
При вхождении в поворот, колесо, движущееся по внутренней стороне, испытывает повышенное сопротивление, по сравнению с внешним. Поскольку жесткой связи между ними нет, то из-за возникшего сопротивления внутреннее колесо замедляется и возникает разница в угловых скоростях на полуосях. Это приводит к тому, что сателлиты начинают крутиться на осях, передавая больший момент на полуось колеса, движущегося по внешней стороне. То есть, благодаря дифференциалу замедление одного колеса приводит к ускорению второго.
Но в функционировании дифференциала есть один существенный недостаток – при потере сопротивления на одном колесе узел весь крутящий момент подаст на него. В результате, при вывешивании одного из ведущих колес или его попадании на скользкий участок, все вращение пойдет на него, второе же колесо остановиться – автомобиль окажется обездвиженным. Для борьбы с этим негативным качеством используются блокировки, которые предотвращают подачу всего крутящего момента только на одну полуось.
Виды узлов
Выше описан принцип работы дифференциала на примере только одного типа узла. На авто же применяются различные варианты этой составляющей трансмиссии. Все существующие виды дифференциалов можно разделить по ряду категорий:
- Место расположения
- Соотношение моментов при распределении
- Конструкция
- Наличие блокировки
Помимо этого, вместо дифференциалов в конструкции авто могут применяться различные муфты, выполняющие ту же функцию, что и дифференциал. Также современные технологии позволяют полностью отказаться от использования дифференциалов, а их роль выполняют системы безопасности.
Места установки
На легковых авто с одной ведущей осью применяется только один дифференциал. В заднеприводных моделях он располагается в ведущем мосту (там, где установлена главная передача). В переднеприводных же моделях этот узел входит в конструкцию КПП.
Пример компоновки дифференциала в МКПП переднего привода
Поскольку дифференциалы на легковых авто обеспечивают распределение крутящего момента между колесами, то они получили название межколесных.
В полноприводных моделях, в которых ведущими являются обе оси, используется два межколесных дифференциала, по одному на каждый ведущий мост.
Отметим, что в полноприводных моделях есть еще одно место распределения крутящего момента – раздаточная коробка, которая подает вращение на обе оси. И здесь также требуется разделение момента, но в этом случае – между мостами, поэтому в конструкции раздатки также применяется дифференциал, называющийся межосевым.
Виды и расположение дифференциалов в зависимости от привода
На многоосных грузовиках с несколькими ведущими осями есть еще одно место установки дифференциала – между группой приводных мостов. Этот узел носит название центрального.
Распределение моментов
Соотношение моментов при распределении бывает разным – симметричным и несимметричным. Первый вариант описан выше – такой узел при движении на ровном участке дороги распределяет момент одинаково на обе полуоси, а его изменение происходи только при изменении условий движения.
Все межколесные дифференциалы являются симметричными
Несимметричные дифференциалы отличаются тем, что передача вращения между двумя осями осуществляется в определенной пропорции, причем неравной. К примеру, на многих кроссоверах используется межосевой дифференциал с соотношением 40/60. Это означает, что крутящий момент, поступающий на раздаточную коробку, делится и на передний ведущий мост поступает 40% вращения, а на задний – 60%. В этом случае передняя ось является больше вспомогательной, позволяющей повысить проходимость, основным же выступает задний мост.
Несимметричное распределение вращения обеспечивают и муфты, которые устанавливаются вместо межосевого дифференциала. При этом муфты позволяют обеспечивать распределение вращения не в строго заданной пропорции, а в целом диапазоне. То есть, на ряде авто с постоянным полным приводом, в зависимости от условий движения, муфта может менять соотношение от 40/60 до 0/100.
Конструктивное исполнение
Все дифференциалы, используемые на авто, построены по единому принципу – на основе планетарной передачи. Но конструктивных исполнений узла – несколько:
- Конический
- Цилиндрический
- Червячный
- Кулачковый
Виды конструкций дифференциалов
Во всех их, кроме кулачкового, разница сводится только к форме и конструктивному исполнению шестерен.
В конических и цилиндрических дифференциалах используются шестеренки соответствующей формы.
Более интересны в плане конструкции червячный и кулачковый узлы. В первом варианте используется червячное зацепление между сателлитами и полуосевыми шестеренками. Такие дифференциалы получили общее название Torsen. Примечательно, что разработано несколько видов конструкции Torsen. Вариант Т1 отличается тем, что сателлиты в нем располагаются перпендикулярно оси вращения. Во втором варианте – Т2, сателлиты располагаются уже параллельно полуосям. Существует еще один тип червячного дифференциала – Quaife. В нем, как и Torsen Т2, сателлиты расположены параллельно, а отличие сводится к форме самих шестеренок.
В кулачковом узле шестеренок вообще нет. В них основными рабочими элементами выступают специальные сухари, установленные между двумя звездочками (кулачковыми шайбами) – внутренней и наружной. Из-за особенностей функционирования этот узел является – дифференциалом повышенного трения.
Виды блокировки
Как уже отмечено, в дифференциалах есть один серьезный недостаток. И решается он использованием специального механизма – блокировки.
По этому критерию узлы делятся на свободные, самоблокирующиеся и с принудительной блокировкой. Узлы свободного типа не имеют в конструкции какой-либо блокировки, поэтому при создании условий негативное качество сразу же проявляется. Такие узлы обычно используются на легковых авто, предназначенных для использования в городских условиях.
В самоблокирующихся узлах дополнительные элементы в конструкции дифференциала при возникновении ситуации, когда весь момент перебрасывается на одно колесо, замедляют вращение полуоси, тем самым направляя часть вращения на другое колесо. Самым распространенным способом обеспечить самоблокировку, является установка фрикционов. Отметим, что червячные дифференциалы не требуют установки дополнительных узлов, поскольку в червячной передаче присутствует эффект самоторможения, поэтому узлы этого типа сами по себе являются самоблокирующимся.
При принудительной блокировке осуществляется жесткое соединение одной из полуосей с корпусом дифференциала, поэтому при задействовании механизма дифференциал полностью прекращает свою работу, и функционирование ведущего моста осуществляется так, как будто колеса соединены между собой жестко одной осью.
Активный дифференциал
Все перечисленные виды дифференциалов работают полностью самостоятельно и вполне справляются с поставленной задачей. Но конструкторам показалось этого мало, поэтому ими был придуман и создан так называемый активный дифференциал.
В обычных узлах распределение вращения делается пропорционально. То есть, замедление одного колеса приводит к пропорциональному возрастанию вращения на втором. Активный же дифференциал позволяет подкорректировать эти пропорции.
Суть его такова – если при прохождении поворота на наружном колесе сделать скорость вращения больше, чем это обеспечивает дифференциал, то возникает эффект подруливания. За счет этого колесо, идущее по внешнему радиусу, «доворачивает» авто, позволяя ему лучше войти в поворот.
А реализовано это путем установки дополнительных планетарных редукторов на полуоси. Причем эти редукторы срабатывают только в определенные моменты, и для этого дополнительные узлы оснастили муфтами с электроприводом.
Принцип работы активного дифференциала
Суть работы активного дифференциала такова – при вхождении в поворот, на полуоси внешнего колеса срабатывает муфта, включая редуктор. Дополнительная передача обеспечивает повышение скорости вращения полуоси, а соответственно и колеса, и оно начинает «подруливать».
Как видно дифференциалы очень разнообразны, и автопроизводители не останавливаются на достигнутом. От модели к модели повышаются их возможности и пределы, скорость работы постоянно возрастает. В конечном счете это может отразиться на надежности в любую из сторон, но безусловно наш комфорт и безопасность возрастает.
Полный привод — Википедия
У этого термина существуют и другие значения, см. 4X (значения).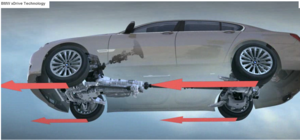 полноприводный автомобиль
полноприводный автомобильПо́лный при́вод — разноплановый комплекс технических решений, обеспечивающий автомобилю постоянную или как минимум временную возможность иметь ведущими все свои колёса. Обоснованием применения полного привода на автомобиле является то, что полноприводный автомобиль может реализовывать в силу тяги всю доступную ему мощность при гораздо меньших силах сцепления, действующих на колёса, что напрямую сказывается на улучшении внедорожных и всепогодных способностей автомобиля. В случае одного двигателя идея полного привода реализуется только посредством полноприводных трансмиссий различных схем, каждая из которых подразумевает свои уникальные правила раздачи мощности между осями. В случае нескольких двигателей идея полного привода может быть реализована посредством раздельного (не связанного друг с другом) привода осей.
2×2, 4×4, 6×6, 8×8, 12×12[1], 24×24, 4WD, AWD, Four-wheel drive и т. п.
До 1980-х годов полный привод ассоциировался почти исключительно с вездеходами, а полноприводные автомобили как правило имели увеличенные дорожный просвет и другие атрибуты повышенной проходимости.
Однако после появления систем полного привода на обычных автомобилях, без основной задачи повышения проходимости, на мелкосерийный Jensen FFruen в 1960-х[2], на серийные Audi с 1980-го, и ряда аналогичных систем у других компаний, привод на все колёса стал рассматриваться и как средство повышения ходовых качеств. В этом случае обеспечивается наиболее эффективное использование мощности двигателя при любом режиме движения, улучшается устойчивость при прохождении виражей, особенно на скользких покрытиях[3].
Именно с этими целями полный привод используется на спортивных автомобилях, например, Lamborghini Murciélago и некоторых моделях Porsche, широко распространён на автомобилях Subaru, а также на представительских автомобилях для повышения уровня активной безопасности — примеры такого использования включают системы 4Matic (на автомобилях Mercedes Benz), XWD (Saab), xDrive (BMW), AWD[4] (Volvo), 4 Motion (Volkswagen), а из российских разработок — трансмиссию малосерийной представительской «Волги» ГАЗ-3105 и представительского проекта «Кортеж».
«Классическая»[править | править код]
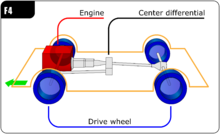 Является дальнейшим развитием заднеприводного автомобиля классической компоновки (двигатель спереди продольно, ведущие колёса задние). Схема трансмиссии полноприводного автомобиля с раздаточной коробкой.
Трансмиссия трёхосного полноприводного автомобиля ЗИЛ-157.
Является дальнейшим развитием заднеприводного автомобиля классической компоновки (двигатель спереди продольно, ведущие колёса задние). Схема трансмиссии полноприводного автомобиля с раздаточной коробкой.
Трансмиссия трёхосного полноприводного автомобиля ЗИЛ-157.Грузовые автомобили повышенной проходимости, автобусы, сконструированные на их базе (ПАЗ-3206, штабные автобусы на шасси ГАЗ-66), внедорожники, начиная с Willys MA и ГАЗ-64.
 Первый в мире серийный спорткар с полным приводом Jensen FFruen (1966)
Первый в мире серийный спорткар с полным приводом Jensen FFruen (1966)Двигатель размещён продольно, в одном блоке со сцеплением и коробкой передач. Крутящий момент передаётся через промежуточный карданный вал на раздаточную коробку (ГАЗ-63, ГАЗ-69), впрочем, раздаточная коробка может быть в одном блоке с коробкой передач (УАЗ-469, УАЗ-452). От раздаточной коробки карданные валы передают крутящий момент на передний ведущий мост и на задний (или на тележку, если автомобиль трёхосный и более). Средний мост при этом проходной, от него к заднему идёт карданный вал. На выпускавшихся ранее трёхосных ЗИС-151, ЗИЛ-157, КрАЗ-214 отдельный карданный вал шёл к среднему мосту, а к заднему подходили последовательно два карданных вала с промежуточным подшипниковым узлом, установленным на среднем мосту.
В 1966 году с использованием «классической» схемы впервые начал серийно выпускаться легковой автомобиль (и первый серийный спорткар в частности), в котором полный привод применялся не для повышения проходимости, а для улучшения ходовых качеств на дорогах с твёрдым покрытием, не случайно эксперты-современники признали Jensen FFruen самой безопасной машиной в мире с точки зрения управляемости[5][6][7][8][9].
На основе переднего привода[править | править код]
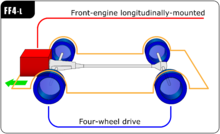 Схема трансмиссии полноприводного автомобиля на основе переднеприводного с продольным расположением двигателя.
Схема трансмиссии полноприводного автомобиля на основе переднеприводного с продольным расположением двигателя. 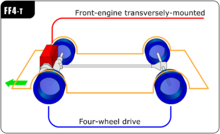 Схема трансмиссии полноприводного автомобиля на основе переднеприводного с поперечным расположением двигателя.
Схема трансмиссии полноприводного автомобиля на основе переднеприводного с поперечным расположением двигателя.На основе переднеприводных легковых автомобилей многие фирмы, особенно японские (родоначальником в 1971 году стала фирма Subaru), выпускают версии с приводом на заднюю ось (как отключаемым, так и постоянно включенным). Встречаются модели как с продольным расположением двигателя, например, Subaru Leone, Audi Quattro и т.д., так и с поперечным (представлены в настоящее время в большинстве случаев). Штатная коробка передач переднеприводного автомобиля (как механическая, так и автоматическая) изменена, установлен редуктор отбора мощности к задней оси, крутящий момент передаётся через карданный вал на заднюю ось. Дифференциал с блокировкой (если он есть, на моделях с постоянным приводом) находится в картере коробки передач. На автомобилях с отключаемой задней осью подключение её производится или рычагом, или кнопкой (вакуумный сервопривод с электрическим управлением). Многие легковые автомобили с полным приводом имеют защиту поддона картера двигателя, дорожный просвет не увеличен в сравнении с переднеприводной моделью (используются одни и те же детали подвески).
 Subaru Leone Break 4WD (1972) — Переднеприводный легковой автомобиль дооснащенный полным приводом.
Subaru Leone Break 4WD (1972) — Переднеприводный легковой автомобиль дооснащенный полным приводом.Из советских легковых автомобилей эту компоновку имели автомобили ЛуАЗ-967 и ЛуАЗ-969, на них устанавливался двигатель воздушного охлаждения автомобилей «Запорожец», изменённая коробка передач имела подключаемый вал отбора мощности к задней оси. Однако эти автомобили изначально относились к категории внедорожников.
С задним расположением двигателя[править | править код]
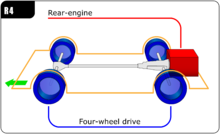 Схема трансмиссии полноприводного автомобиля на основе заднеприводного с продольным расположением двигателя.
Subaru Sambar 4WD, Япония. Откинув задний бампер, можно получить доступ к двигателю.
Схема трансмиссии полноприводного автомобиля на основе заднеприводного с продольным расположением двигателя.
Subaru Sambar 4WD, Япония. Откинув задний бампер, можно получить доступ к двигателю.До 2010-х существовало небольшое количество моделей полноприводных автомобилей с заднемоторной компоновкой, например, фургоны и микроавтобусы Subaru Sambar/Domingo, малотоннажные грузовики (грузоподъёмностью около 500 кг) других японских фирм, например, Honda. Основной привод на заднюю ось, коробка передач объединена с главной передачей. Привод на переднюю ось отключаемый или постоянно включен. Доступ к двигателю происходит через откидной задний бампер или через разбираемый пол в салоне микроавтобуса. Подвеска колёс независимая.
 VW T3 Syncro Doppelcabine Lastwagen, Германия-Австрия
VW T3 Syncro Doppelcabine Lastwagen, Германия-АвстрияВ Австрии фирма Steyr по заказу VAG выпускала в 1985-1992 гг. полноприводную версию Syncro заднемоторного микроавтобуса Volkswagen Transporter T3. С конца 1980-х модель Transporter Syncro предлагалась еще и в кузовах фургон и пикап, а также премиальных исполнениях Caravelle и Carat.
Некоторые колёсные бронированные машины также имеют заднее расположение двигателя (например, БРДМ-2, БТР-60), но в их конструкции используются агрегаты от «классических» грузовых полноприводных автомобилей (двигатель с коробкой передач, раздаточная коробка).
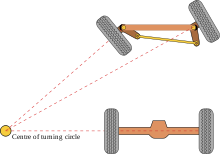 Схема, иллюстрирующая положение колёс при повороте автомобиля. Управляемые колёса передней оси катятся по окружности большего радиуса, нежели задние.
Схема, иллюстрирующая положение колёс при повороте автомобиля. Управляемые колёса передней оси катятся по окружности большего радиуса, нежели задние.Под схемой ПП подразумевается то, каким образом передняя и задняя ведущая оси включены в раздачу мощности от двигателя. Выбор той или иной схемы для конкретного ТС определяется многими факторами: конструкцией шасси и способом поворота, областью предполагаемой эксплуатации, конструкторскими предпочтениями, ценой. Применение ПП всегда ставит перед конструктором задачу, как и чем на разрабатываемом ТС будет обеспечиваться возможность вращения ведущих осей с разными угловыми скоростями, что в свою очередь проистекает из-за факта того, что на всех ТС за исключением тракторов со складываемыми полурамами колёса передней и задней оси в повороте катятся по разным радиусам. Даже на ТС с полноуправляемым шасси колёса передней и задней оси обычно отклоняются на разные углы для поворота, а абсолютно подавляющее большинство ТС имеют как управляемые (обычно передние), так и неуправляемые оси, что при движении на дуге предполагает их неравную частоту вращения. У каждой схемы ПП имеется свой уникальный способ решения задачи обеспечения разноскоростного вращения осей в поворотах, предполагающий определённый набор кострукторских решений и используемых механических передач вращения. В некоторых случаях решением этой задачи вообще пренебрегают, и это тоже является одной из схем ПП.
Можно выделить четыре основных схемы полного привода: подключаемый полный привод (part-time), постоянный полный привод (full-time), постоянный по требованию полный привод (on-demand full-time) и многорежимный полный привод (selectable). На одной и той же модели ТС на разных модификациях могут применяться разные схемы (типичный пример — Jeep Wrangler).
Подключаемый полный привод[править | править код]
Один из самых компактных в мире классических внедорожников с несущим кузовом — российская LADA 4×4 ВАЗ-2121.Самая простая и в то же время самая надёжная схема полного привода: при нормальной эксплуатации крутящий момент передаётся только на одну ось, а при необходимости подключается вторая ось — с помощью раздаточной коробки. При подключении о́си жёстко связываются между собой и вращаются с одинаковой скоростью, что создаёт некоторые ограничения: полный привод можно использовать только на покрытиях, допускающих проскальзывание колёс (грязь, песок, снег, лёд и т. п.). Какие колёса будут пробуксовывать — передние или задние — это зависит от нагрузки на ось в данный момент.
При жёсткой связи ведущих мостов в трансмиссии может возникнуть циркуляция мощности. При повороте циркулирующая мощность (ЦМ) может быть значительной. ЦМ не используется для преодоления сил сопротивления движению автомобиля, дополнительно нагружает механизмы трансмиссии и шины, вызывая их повышенный износ. Кроме того, из-за увеличения суммарной мощности, передаваемой через механизмы трансмиссии, возрастают потери мощности в трансмиссии на буксовании колёс, увеличивая расход топлива и износ деталей двигателя. Поэтому ЦМ является вредной, и её часто называют паразитной мощностью. Чтобы уменьшить дополнительное изнашивание механизмов трансмиссии, шин и расход топлива, вызванных ЦМ и перераспределением крутящего момента, при раздаточной коробке с блокированным приводом необходимо включать передний ведущий мост только для повышения проходимости и устойчивости автомобиля. При движении по хорошим дорогам необходимо принудительное отключение переднего ведущего моста для устранения циркуляции мощности или перераспределения крутящего момента.
Таким образом, основной недостаток подключаемого полного привода проявляется при перемещении по поверхности с часто меняющимися свойствами — асфальт с пятнами льда или снега, твердый грунт с участками грязи и т. д. Необходимо либо постоянно подключать и затем выключать передний мост (что иногда сопряжено с определёнными сложностями в зависимости от реализации способа подключения моста), либо перемещаться на заднем мосту, рискуя застрять, либо перемещаться на полном приводе, изнашивая трансмиссию циркуляциями мощности на хороших участках дороги.
Постоянный полный привод[править | править код]
Модель Audi Allroad с постоянным полным приводом.Постоянный полный привод подразумевает постоянное подключение всех колёс к двигателю, для чего он подключается к осям через дифференциал. Некоторые модели автомобилей имеют принудительную блокировку межосевого дифференциала, например, ВАЗ-2121 «Нива», что позволяет им становиться аналогичными автомобилям с подключаемым полным приводом (в общем это повышает проходимость автомобиля). Некоторые современные автомобили имеют электронное управление межосевым дифференциалом, позволяющее динамически менять соотношение передаваемого момента между осями. В основном это используется для уверенного движения по дорогам, например, в системах динамической стабилизации. Тем не менее, в некоторых ситуациях это может внести неоднозначность в реакциях автомобиля на педаль газа.
Некоторые вседорожники имеют раздаточную коробку, поддерживающую как режим постоянного полного привода, так и режим подключаемого полного привода, то есть имеют дифференциал, блокировку дифференциала и возможность полного отключения одной оси. Такая схема считается наиболее предпочтительной для многоцелевого вседорожника.
Полный привод по требованию[править | править код]

Эта схема классифицируется продавцами автомобилей как разновидность постоянного полного привода. Преимуществ «настоящего» постоянного полного привода не даёт. Фактически это подключаемый полный привод с тем отличием, что подключение происходит автоматически. В этой схеме одна ось подключена жёстко, а вторая (передняя или задняя, чаще — задняя) подключается при проскальзывании первой через разнообразные муфты (вискомуфта (Гольф-3), Халдекс (Гольф-4)…), многодисковое сцепление, работающее в масляной ванне (автомобили Nissan, система ATTESA). Управление муфтой осуществляется электроникой или механико-гидравлическим образом, за исключением вискомуфты. Недостатком такой схемы можно считать необходимость улавливания момента включения полного привода для корректировки управления автомобилем. В некоторых случаях это приводит к неоднозначности реакций на добавление тяги (открытие газа) и усложняет контроль над автомобилем на бездорожье. Вискомуфта сравнительно ненадёжна и может быть быстро выведена из строя на тяжёлом бездорожье.
Многорежимный полный привод[править | править код]
В другую категорию можно выделить автомобили Mitsubishi Pajero (трансмиссия Super Select 4WD) и Jeep Grand Cherookee (трансмиссия SelecTrac), Nissan Pathfinder (All-mode 4WD) с их селективной трансмиссией, которую можно назвать системой постоянного полного привода (автоматически подключаемого в случае с Nissan Pathfinder) с возможностью принудительного отключения переднего моста.
В Pajero, например, можно выбрать один из следующих режимов: 2WD, 4WD с автоматической блокировкой центрального дифференциала (аналогично Full-Time 4WD), 4WD с жестко заблокированным дифференциалом (аналогично Part-Time 4WD) и пониженная передача (Low range Part-Time 4WD).
Полный привод с использованием вспомогательного тягового электродвигателя[править | править код]
Некоторые легковые переднеприводные автомобили имеют ведущую заднюю ось, в корпусе главной передачи которой установлен тяговый электродвигатель небольшой мощности, включаемый, как правило, водителем при необходимости (система e.4WD). Электродвигатель получает питание от автомобильного генератора, напряжение и ток регулируется автоматически в зависимости от условий движения.
Подключенный задний привод улучшает управляемость автомобиля на скользкой дороге, а также позволяет более уверенно преодолевать тяжёлые участки (снег, гололедицу, грязь).
Система активного распределения крутящего момента (ATTS)
Система активного распределения крутящего момента ATTS (Active Torque Transfer System) служит для улучшения управляемости автомобиля.
При повороте автомобиля на колеса автомобиля действуют две главные силы – тяговая, ускоряющая автомобиль и боковая, которая заставляет автомобиль поворачивать. Обе они связаны с силой трения, возникающей в пятне контакта. Сила трения в свою очередь, ограничена лимитированными сцепными свойствами шины и покрытия.
Рассмотрим распределение сил на колесах при повороте автомобиля.
Рис. Распределение сил на колесах автомобиля при повороте:
а) обычного автомобиля; б – автомобиля с системой активного распределения крутящего момента
При повороте из-за действия центробежной силы внутреннее колесо оказывается разгруженным, то есть оно находится в худших условиях по сцеплению с дорогой. Соответственно, уменьшится и та суммарная сила, сложенная из тяговой и боковой, которую может воспринять колесо, и поэтому оно в меньшей степени будет способно ускорять и поворачивать автомобиль. Система ATTS перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой силы с внутреннего колеса и перебрасывая его на более нагруженное внешнее. В результате у малонагруженной внутренней шины, освобожденной от излишка тяги, появляется больше возможностей для реализации боковой силы, так необходимой в повороте.
Увеличение крутящего момента на наружном колесе позволяет создать дополнительный момент, который стремится «затащить» автомобиль в поворот.
Задача перераспределения крутящего момента не только между левым и правым колесами, но и задней и передней осями, решена компаниями «Хонда» и «Мицубиси».
Система электронного управления включает в себя датчики угла поворота бокового и углового ускорения, скорости вращения колес, частоты вращения коленчатого вала двигателя и давления воздуха на впуске, передаточного отношения в трансмиссии.
Рис. Схема трансмиссии полноприводного автомобиля Mitsubishi Lancer Evolution VIII:
1 – коробка передач; 2 – двигатель; 3 – муфта блокировки межосевого дифференциала; 4 – блок управления дифференциалами; 5 – датчик угла поворота рулевого колеса; 6 – датчик положения дроссельной заслонки; 7 – колесные датчики АБС; 8 – датчики продольного ускорения; 9 – датчики поперечного ускорения; 10 – задний активный дифференциал; 11 – гидронасос с гидроаккумулятором; 12 – лампа стоп-сигнала; 13 – датчик включения стояночного тормоза; 14 – индикатор переключения режимов: асфальт/гравий/снег; 15 – блок управления АБС; 16 – передний дифференциал; 17 – межосевой дифференциал (50:50)
Информация от всех датчиков поступает в ЭБУ, рассчитывает оптимальное распределение крутящего момента по колесам. Далее ЭБУ передает информацию блоку управления дифференциалом для распределения момента между осями и задними колесами в соответствии с условиями движения. На нужную ось он перераспределяет от 30 до 70% момента, на одно из задних колес – от 0 до 100%. В обычных условиях до 70% крутящего момента передается на передние колеса. При больших ускорениях до 70% крутящего момента поступает на заднюю ось для улучшения динамики разгона и одновременной стабилизации движения. При ускорении в повороте почти 100% крутящего момента может передаваться на заднее внешнее колесо. Диаметрально противоположная картина возникает при снижении скорости на изгибе дороги – крутящий момент будет передаваться на внутреннее колесо.
Рис. Траектория движения автомобиля с электронным приводом управляемых колес:
1 – наибольший крутящий момент; 2 – траектория движения автомобиля с электронным приводом управляемых колес; 3 – автомобиля без электронного привода управляемых колес
Существуют различия в приводе дисков сцеплений приводов колес. Компания «Мицубиси» в своих конструкциях применяет электрогидравлический привод, а компания «Хонда» – электромагнитный.
В дифференциале автомобилей «Хонда» применяются электромагнитные многодисковые сцепления 4. Каждое сцепление индивидуально передает крутящий момент к одному из задних колес правому или левому. Встроенные электромагнитные соленоиды 3 изменяют положение сердечника магнита относительно его корпуса. Блок управления дифференциалом, в зависимости от условий движения определяет какой ток подать на магнит – тем самым, сжимая пакеты дисков и плавно меняя распределение крутящего момента. Оба сцепления способны работать независимо друг от друга.
Модули сцепления дополнены собственными планетарными передачами 2.
Вместе с дифференциалом работает ускорительный модуль с гидравлическим приводом (на рисунке не показан), включающий планетарную передачу и передающий крутящий момент на ведущую шестерню гипоидной передачи 1. Этот модуль позволяет сделать более надежным поведение автомобиля в крутых поворотах. Он принудительно «подкручивает» задние колеса в виражах.
В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в том, что при традиционной схеме трансмиссии заднее внешнее колесо вращается медленнее передних и тем самым препятствует полноценной передаче мощности. Как результат – ухудшение управляемости и риск заноса. Эту проблему решает ускорительный блок.
Рис. Привод задних колес с электромагнитным сцеплением:
1 – ведущая шестерня гипоидной передачи; 2 – планетарная передача; 3 – соленоид; 4 – многодисковые сцепления
Во время движения по прямой, шестерни планетарной передачи вращаются синхронно с карданным валом – скорость передних и задних колес одинакова. При входе автомобиля в поворот гидравлический привод посредством еще одного, уже третьего по счету модуля сцепления включает планетарную передачу ускорительного модуля в работу, при этом заднее колесо с нужной стороны «подкручивается» до оптимальной скорости.
Блок управления, воспринимая сигнала датчиков, может определять стиль вождения. Когда автомобиль едет прямо, фрикционы разомкнуты и планетарные шестерни системы вращаются вхолостую, дифференциал поровну распределяя идущий от двигателя крутящий момент между ведущими колесами.
Если водитель вводит автомобиль в поворот, держа ногу на педали акселератора реакция электронной системы управления будет отличаться от ситуации, когда автомобиль описывает дугу по инерции или при торможении. При этом один из фрикционов с помощью исполнительного устройства частично или полностью блокируется, при этом крутящий момент на колесах изменяется, что позволяет перераспределить его до 80% с противоположного колеса.
При резком трогании с места у полноприводных автомобилей возникает дефицит крутящего момента на колесах задней оси и избыток – на передней. Чтобы этого не происходило, система оборудована датчиком ускорения, фиксирующим момент, когда необходимо перебросить энергию к задней оси. При спокойном режиме движения больший момент передается на передние колеса, способствуя более стабильному поведению автомобиля.