Система аср: 403 — Доступ запрещён – Asr — Википедия
- 21.12.2020
Понятие устойчивости автоматической системы регулирования (АСР)
В реальных условиях АСР не может все время оставаться в постоянном режиме, так как на нее все время действуют внешние возмущения, которые стремятся изменить значение регулируемого параметра. Автоматический регулятор в свою очередь также стремится привести значение регулируемого параметра с заданным. Переход автоматического регулятора, то есть всей системы в целом, из одного состояния в другое осуществляется не мгновенно, а через переходные процессы, которые зависят от параметров. Следует заметить, что исследования установившегося режима дает возможность решить вопрос о пригодности АСР для проведения какого-либо процесса с заданной точностью. Однако для практического использования этого недостаточно. Пригодность любой АСР в первую очередь определяется устойчивостью и приемлемым качеством процесса регулирования.
Устойчивостью называется способность системы возвращаться к заданному устойчивого состояния после приложения или снятия внешнего возмущения.
 Рисунок 1 — К объяснения равновесного состояния: а — устойчивый; б — неустойчивый; в — равнодушен.
Рисунок 1 — К объяснения равновесного состояния: а — устойчивый; б — неустойчивый; в — равнодушен.
Например в устойчивом равновесном состоянии (рисунок 1, а) при любом малом отклонении шарика от начального положения А
Пример неустойчивого равновесного состояния приведен на рисунке 1, б. Предположим, что шарик лежит на возвышении. После отклонения его от равновесного состояния А шарик не вернется в исходное состояние, поскольку возникающая сила F1 стремится еще больше отклонить его от состояния равновесия.
На рисунке 1, в приведен пример безразличного равновесного состояния. Допустим шарик находится на плоскости. После отклонения шарики от равновесного состояния А она займет один из новых равновесных состояний (A1, A2, …, А
Устойчивость АСР является важнейшим показателем процесса регулирования. Стойкостью в «малом» называют устойчивость системы при бесконечно малых отклонениях. Если линейная АСР устойчива в «малом», то она обязательно стойка в «большом». Российский ученый А. М. Ляпунов дал математическое определение и ввел понятие об устойчивости АСР в «малом» с помощью линеализованого уравнения. Система называется устойчивой в «малом», если она возвращается в состояние равновесия при ограниченных значениях возмущающих воздействий. Система называется устойчивой в «большом», если она возвращается в состояние равновесия при любом значении возмущающего действия.
Критерии устойчивости
Прежде чем перейти к критериям устойчивости, покажем порядок составления характеристического уравнения. Из курса высшей математики известно, что линейное дифференциальное уравнение с постоянными коэффициентами без правой части
yn) + p1 y(n-1) + p2 y(n-2) + … + pn y = 0 (1.1)
решается с помощью характеристического уравнения
rn + pl rn-1 + p2 rn-2 + …+ рп = 0. (1.2)
К примеру. Найти решение дифференциального уравнения
8у» + 2у’ — 3у = 0 де у’ = dy/dt; y» = d2y/dt2. Искать решение вида у = ert. Составим характеристическое уравнение 8 r2 + 2r — 3 = 0.
Найдем корни характеристического уравнения r1=1/2; r2 = -3/4.
Общее решение уравнения будет иметь следующий вид , где C1 и С2 — постоянные интеграции.
, где C1 и С2 — постоянные интеграции.
Анализ устойчивости АСР сводится к задаче чистой алгебры, то есть к определению знака корней характеристического уравнения. Следует заметить, что просто решаются только уравнения не выше второго порядка, а уравнения выше второго порядка решаются аналитически сложно, причем уравнения высших порядков вообще не имеют аналитического решения и решаются лишь приблизительно. Для облегчения исследования устойчивости можно и не решать характеристические уравнения, но при этом необходимо использовать косвенные методы определения знаков корней, которые получили название
Критерии алгебры в основном применяются для исследования АСР, которые описываются уравнением четвертого порядка не выше. Частотные критерии, имея большую наглядность, чаще всего применяются для тех случаев, когда требуется установить влияние какого-либо параметра на устойчивость АСР, а также для систем, описываемых дифференциальными уравнениями выше четвертого порядка. Все критерии устойчивости дают возможность установить следующее: негативные вещественные части всех корней характеристического уравнения. Выбор критерия зависит от конкретных условий.
В качестве примера алгебраической критерия устойчивости рассмотрим критерий, предложенный в 1876 г.. Российским ученым И. А. Вышнеградского. Этот критерий разработан для АСР с дифференциальным уравнением третьего порядка.
Например: предположим, что характеристическое уравнение третьего порядка данное a3 r3 + a2 r2 + a1 r1 + a = 0. Разделим все члены уравнения на а (*). Введем новую переменную
(*). Введем новую переменную

Структура аср и ее основные элементы.
По виду используемой энергии различают АСР: механические, гидравлические, пневматические, электрические, комбинированные.
Регулятор, выполняя свои функции, должен перемещать регулировочные органы (РО) в требуемом направлении, для обеспечения устойчивого движения системы. При этом нередко для перестановки РО требуются затраты значительной мощности, которую не могут развить регуляторы. В таких случаях в составе АСР предусматривают усилительные устройства, которые включают в передаточный механизм между регулятором и РО. Усилители воспроизводят все указания от регулятора, и мощность сигнала от них должна быть достаточной для необходимого перемещения регулировочных органов. Автоматическое регулирование без участия усилителей называется прямым регулированием, а при наличии их в передаточном механизме — непрямым регулированием.


Рис. 1.4 Схема прямого (а) и непрямого регулирования (б) турбин.
РС- регулятор скорости, ПЗ- промежуточный золотник, СМ-сервомотор, РО- регулировочные органы (клапаны) турбины.
АСР с использованием электрической энергии нашли широкое применение для котельного оборудования и вспомогательных установок на ТЭС (Рис. 1.5)

Рис 1.5 Схема электрической системы регулирования.
Д-датчик, в состав которого могут входить преобразователь энергии и чувствительный элемент: давления, температуры, расхода, других регулируемых величин;
ЗД-задатчик, с помощью которого устанавливают заданное значение регулируемого параметра.
УОС-устройство внутренней обратной связи, предназначенной для стабилизации процесса регулирования, его сигнал направлен навстречу хвх;
ИБ-измерительный блок, производит алгебраическое суммирование сигналов, поступающих от датчика и задатчика;
КУУ-командно — усилительное устройство;
ИМ-исполнительный механизм.
Примером использования в АСР комбинированного вида энергии является система регулирования турбины, в которой установлен электрогидравлический преобразователь для преобразования электрического сигнала от регуляторов энергосистемы (корректора частоты, противоаварийной автоматики, регулятора обменной мощности) в гидравлический сигнал для гидравлической системы регулирования турбоагрегата.
1.2 Переходные процессы в аср.
Нарушения равновесных режимов в АСР происходят под влиянием различных факторов, например, управляющего воздействия, направленного к регулятору от задатчика, или возмущающего воздействия приложенного к объекту регулирования. Системы регулирования ведут себя по отношению к этим воздействиям существенно различным образом. В то время как управляющее воздействие определяет величину и направление изменения регулируемого параметра, возмущающее воздействие не должно существенно влиять на изменение регулируемых параметров
Виды переходных процессов в АСР при
единичных ступенчатых воздействиях  и
и (Рис. 1.6)
(Рис. 1.6)
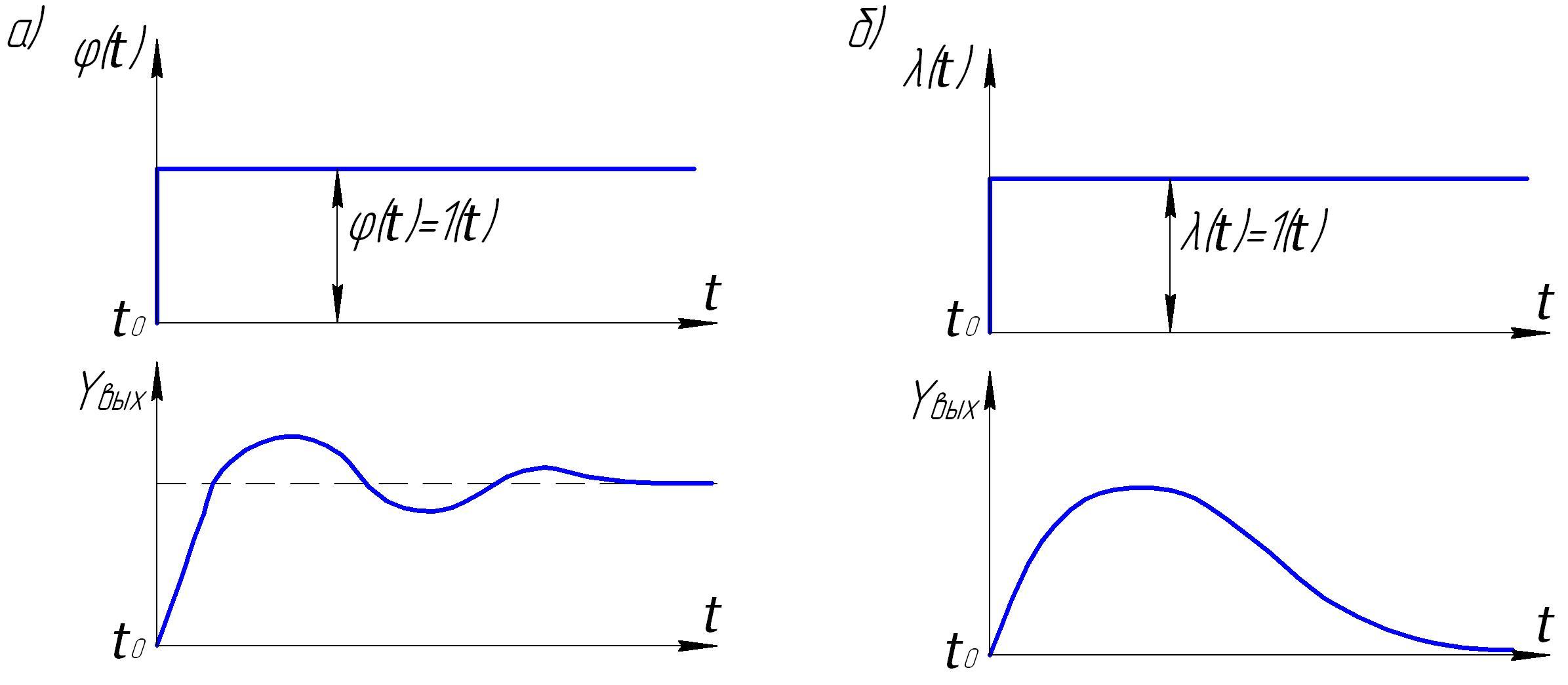
Рис. 1.6 Переходные процессы в устойчивых АСР.
а) – при управляющем воздействии, б) – при возмущающем воздействии.
Для устойчивых АСР переходные процессы
сходящиеся, т.е.  стремится к заданному значению или
возвращается к прежнему. В неустойчивых
АСР переходные процессы расходящиеся:
регулируемый параметр отклоняется от
своего заданного значения на большую
величину с возрастающей скоростью (Рис.
1.7,а)
стремится к заданному значению или
возвращается к прежнему. В неустойчивых
АСР переходные процессы расходящиеся:
регулируемый параметр отклоняется от
своего заданного значения на большую
величину с возрастающей скоростью (Рис.
1.7,а)
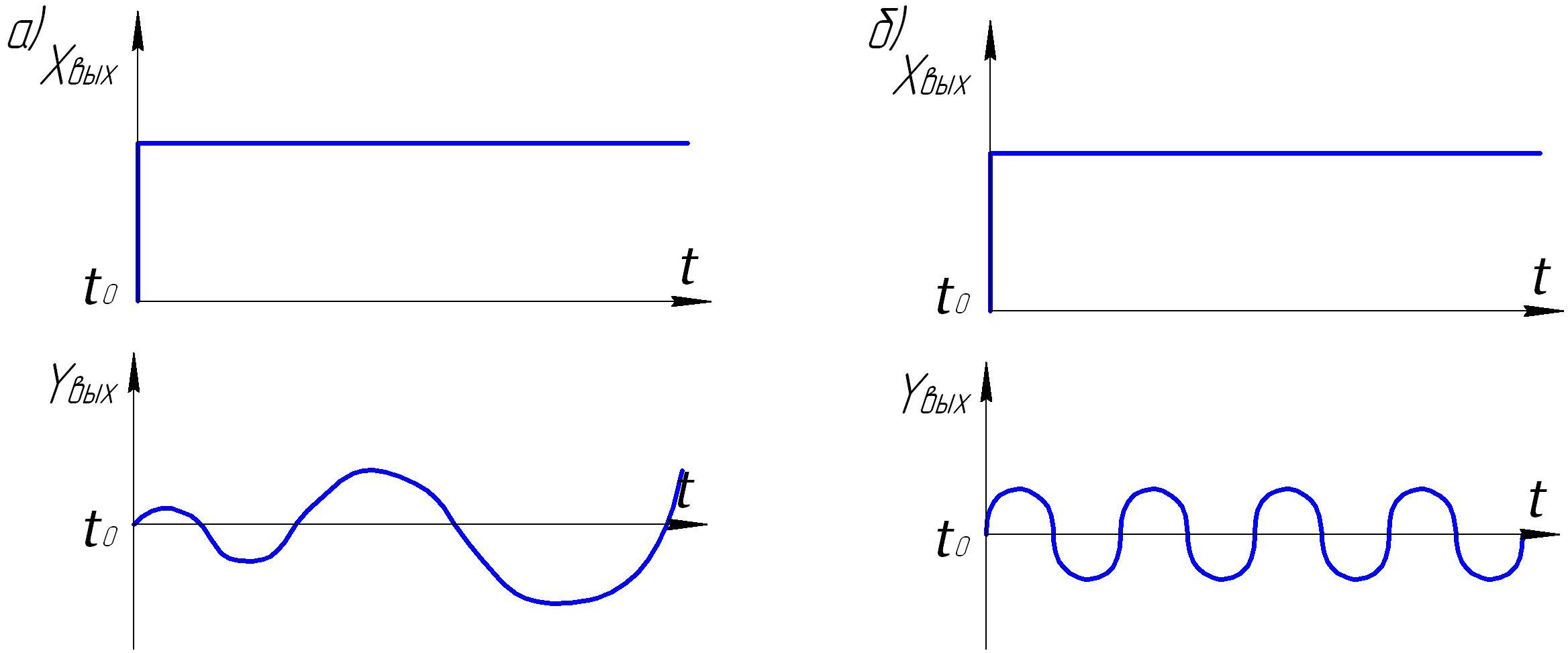
Рис. 1.7 Переходные процессы в АСР: а) неустойчивых, б) находящихся на границе устойчивости.
АСР может находится на границе
устойчивости, когда регулируемый
параметр не принимает заданного значения
и его отклонения имеет постоянную
амплитуду отклонения от заданного
значения (Рис. 1.7,б). При том или ином
воздействии требуемые и действительные
значения регулируемой величины могут
отличаться друг от друга. Разность между
заданным  и действительным значением регулируемой
величины
и действительным значением регулируемой
величины называется ошибкой регулирования.
называется ошибкой регулирования.
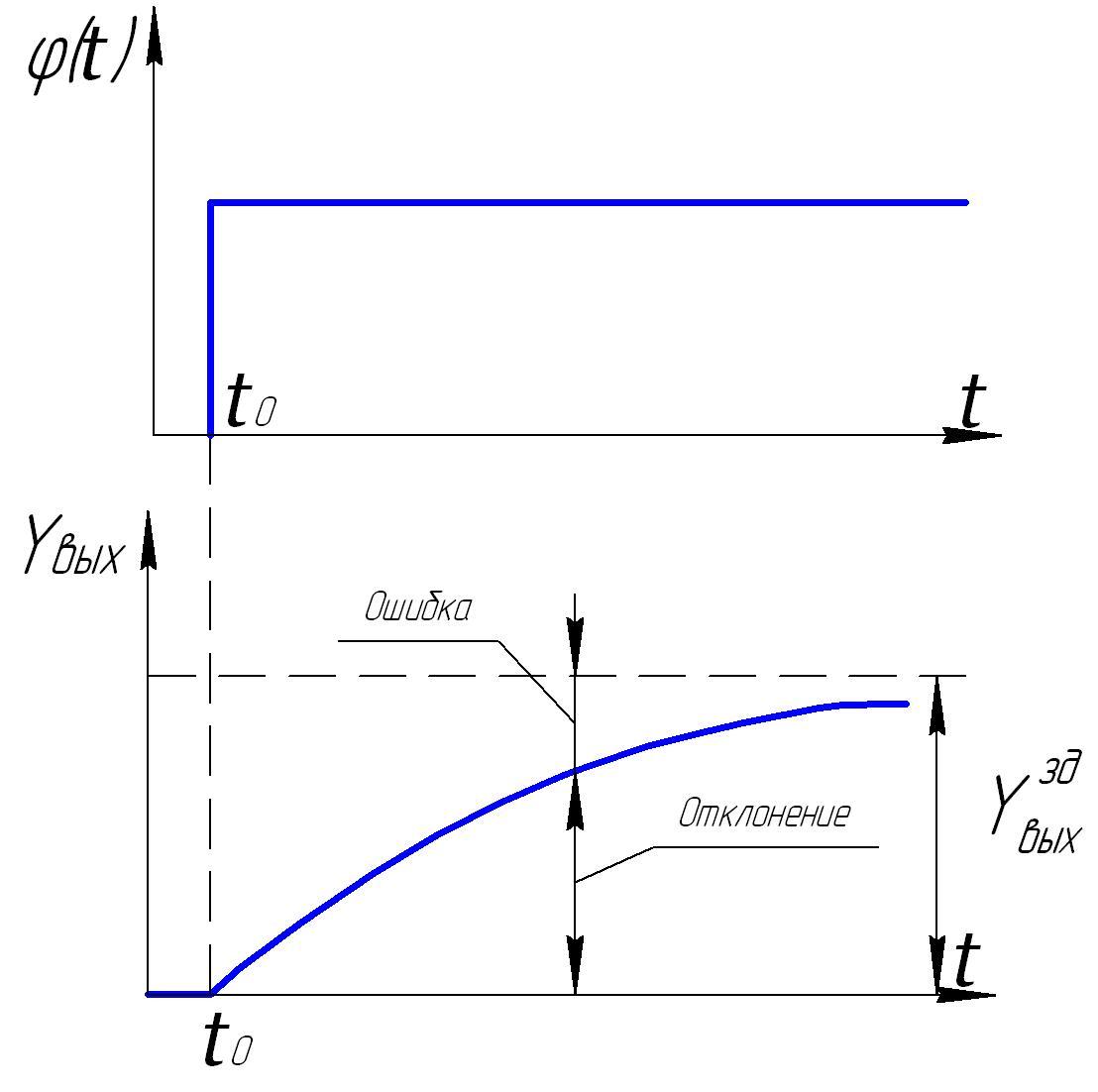
Рис. 1.8 Ошибки и отклонения для АСР.
Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за начало отсчета. Различают динамическую ошибку и отклонение в переходных процессах и ошибку и отклонение в равновесных режимах — статическая ошибка, отклонение.
2. Классификация АСР. Принципы управления » СтудИзба
2. Классификация АСР. Принципы управления.
Управление — это целенаправленное воздействие на объект, которое обеспечивает его оптимальное (в определенном смысле) функционирование и количественно оценивается величиной критерия (показателя) качества. Критерии могут иметь технологическую или экономическую природу (производительность технологической установки, себестоимость продукции или т. п.).
Во время работы выходные величины отклоняются от заданных значений под действием возмущений zВи появляется рассогласование между текущими уТ и заданными и3 значениями выходных величин объекта. Если при наличии возмущений zВ объект самостоятельно обеспечивает нормальное функционирование, т. е. самостоятельно устраняет возникающее рассогласования уТ—и3, то он не нуждается в управлении. Если же объект не обеспечивает выполнения условий нормальной работы, то для нейтрализации влияния возмущений на него налагают управляющее воздействие хР, изменяя с помощью исполнительного устройства материальные или тепловые потоки объекта. Таким образом, в процессе управления на объект наносятся воздействия, которые компенсируют возмущения и обеспечивают поддержание нормального режима его работы.
Регулированием называют поддержание выходных величин объекта вблизи требуемых постоянных или переменных значений с целью обеспечения нормального режима его работы посредством подачи на объект управляющих воздействий.
Автоматическое устройство, обеспечивающее поддержание выходных величин объекта вблизи требуемых значений, называют автоматическим регулятором.
По принципу регулирования АСР делят на действующие по отклонению, по возмущению и по комбинированному принципу.
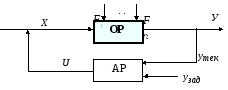
По отклонению. В системах, работающих по отклонению регулируемой величины от заданного значения (рис. 1-2, а), возмущение z вызывает отклонение текущего значения регулируемой величины у от ее заданного значения и. Автоматический регулятор АР сравнивает значения у и и, при их рассогласовании вырабатывает регулирующее воздействие х соответствующего знака, которое через исполнительное устройство (на рис. не показано) подается на объект регулирования ОР, и устраняет это рассогласование. В системах регулирования по отклонению для формирования регулирующих воздействий необходимо рассогласование, в этом состоит их недостаток, поскольку задача регулятора состоит именно в том, чтобы не допускать рассогласование. Однако на практике такие системы получили преимущественное распространение, так как регулирующее воздействие в них осуществляется независимо от числа, вида и места появления возмущающих воздействий. Системы регулирования по отклонению являются замкнутыми.
По возмущению. При регулировании по возмущению (рис 1-2, б) регулятор АРВполучает информацию о текущем значении основного возмущающего воздействия z1. При измерении его и несовпадении с номинальным значением иВрегулятор формирует регулирующее воздействие х, направляемое на объект. В системах, действующих по возмущению, сигнал регулирования проходит по контуру быстрее, чем в системах, построенных по принципу отклонения, вследствие чего возмущающее воздействие может быть устранено еще до появления рассогласования. Однако реализовать регулирование по возмущению для большинства объектов химической технологии практически не представляется, возможным, так как это требует учета влияния всех возмущений объекта (z1, z2, …) число которых, как правило, велико; кроме того, некоторые из них не могут быть оценены количественно. Например, измерение таких возмущений как изменение активности катализатора, гидродинамической обстановки в аппарате, условий теплопередачи через стенку теплообменника и многих других наталкивается на принципиальные трудности и часто неосуществимо. Обычно учитывают основное возмущение, например, по нагрузке объекта.
Кроме того, в контур регулирования системы по возмущению сигналы о текущем значении регулируемой величины у не поступают, поэтому с течением времени отклонение регулируемой величины от номинального значения может превысить допустимые пределы. Системы регулирования по возмущению являются разомкнутыми.
По комбинированному принципу. При таком регулировании, т. е. при совместном использовании принципов регулирования по отклонению, и по возмущению (рис. 1-6, в), удается получить высококачественные системы. В них влияние основного возмущения z1нейтрализуется регулятором АРВ, работающим по принципу возмущения, а влияние других возмущений (например, z2 и др.)—регулятором АР, реагирующим на отклонение текущего значения реагируемой величины от заданного значения.
По числу регулируемых величин АСР делят на одномерные и многомерные. Одномерные системы имеют по одной регулируемой величине, вторые — по несколько регулируемых величин.
В свою очередь многомерные системы могут быть разделены на системы несвязанного и связанного регулирования. В первых из них регуляторы непосредственно не связаны между собой и воздействуют на общий для них объект регулирования раздельно. Системы несвязанного регулирования обычно используются, когда взаимное влияние регулируемых величин объекта мало или практически отсутствует. В противном случае применяют системы связанного регулирования, в которых регуляторы различных величин одного технологического объекта связаны между собой внешними связями (вне объекта) с целью ослабления взаимного влияния регулируемых величин. Если при этом удается полностью исключить влияние регулируемых величин одна на другую, то такая система связанного регулирования называется автономной.
По числу контуров прохождения сигналов АСР делят на одноконтурные и многоконтурные. Одноконтурными называются системы, содержащие один замкнутый контур, а многоконтурными — имеющие несколько замкнутых контуров
По назначению (характеру изменения задающего воздействия) АСР подразделяются на системы автоматической стабилизации, системы программного управления и следящие системы.
Системы автоматической стабилизации предназначены для поддержания регулируемой величины на заданном значении, которое устанавливается постоянным (u=const). Это наиболее распространенные системы.
Системы программного управления построены таким образом, что заданное значение регулируемой величины представляет собой известную заранее функцию времени u=f(t). Они снабжаются программными датчиками, формирующими величину и во времени. Такие системы используются при автоматизации химико-технологических процессов периодического действия или процессов, работающих по определенному циклу.
В следящих системах заданное значение регулируемой величины заранее не известно и является функцией внешней независимой технологической величины u=f(y1). Эти системы служат для регулирования одной технологической величины (ведомой), находящейся в определенной зависимости от значений другой (ведущей) технологической величины. Разновидностью следящих систем являются системы регулирования соотношения двух величин, например, расходов двух продуктов. Такие системы воспроизводят на выходе изменение ведомой величины в определенном соотношении с изменением ведущей. Эти системы стремятся устранить рассогласование между значением ведущей величины, умноженным на постоянный коэффициент, и значением ведомой величины.
По характеру регулирующих воздействий различают непрерывные АСР, релейные и импульсные.
Непрерывные АСР построены так, что непрерывному изменению входной величины системы соответствует непрерывное изменение величины на выходе каждого звена.
Релейные (позиционные) ACP имеют в своем составе релейное звено, которое преобразует непрерывную входную величину в дискретную релейную, принимающую только два фиксированных значения: минимально и максимально возможное. Релейные звенья позволяют создавать системы с очень большими коэффициентами усиления. Однако в замкнутом контуре регулирования наличие релейных звеньев приводит к автоколебаниям регулируемой величины с определенными периодом и амплитудой. Системы с позиционными регуляторам являются релейными.
Импульсные АСР имеют в своем составе импульсное звено, которое преобразует непрерывную входную величину в дискретную импульсную, т. е. в последовательность импульсов с определенным периодом их чередования. Период появления импульсов задается принудительно. Входной величине пропорциональны амплитуда или длительность импульсов на выходе. Введение импульсного звена освобождает измерительное устройство системы от нагрузки и позволяет применять на выходе маломощное, но более чувствительное измерительное устройство, реагирующее на малые отклонения регулируемой величины, что приводит к повышению качества работы системы.
В импульсном режиме возможно построение многоканальных схем, при этом уменьшается расход энергии на приведение в действие исполнительного устройства.
Системы с цифровым вычислительным устройством в замкнутом контуре регулирования также работают в импульсном режиме, поскольку цифровое устройство выдает результат вычисления в виде импульсов, следующих через некоторые промежутки времени, необходимые для проведения вычислений. Это устройство применяют, когда отклонение регулируемой величины от заданного значения должно вычисляться по показаниям нескольких измерительных приборов или когда в соответствии с критериями наилучшего качества работы системы необходимо вычислять программу изменения регулируемой величины.
Автоматизированная система управления технологическим процессом — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 28 сентября 2018; проверки требуют 12 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 28 сентября 2018; проверки требуют 12 правок.Автоматизированная система управления технологическим процессом (АСУ ТП) — группа решений технических и программных средств, предназначенных для автоматизации управления технологическим оборудованием на промышленных предприятиях. Может иметь связь с более общей автоматизированной системой управления предприятием (АСУП).
Под АСУ ТП обычно понимается целостное решение, обеспечивающее автоматизацию основных операций технологического процесса на производстве в целом или каком-то его участке, выпускающем относительно завершённое изделие.
Понятие «автоматизированный», в отличие от понятия «автоматический», подчёркивает необходимость участия человека в отдельных операциях, как в целях сохранения контроля над процессом, так и в связи со сложностью или нецелесообразностью автоматизации отдельных операций.
Составными частями АСУ ТП могут быть отдельные системы автоматического управления (САУ) и автоматизированные устройства, связанные в единый комплекс. Такие как системы диспетчерского управления и сбора данных (SCADA), распределенные системы управления (DCS), системы противоаварийной защиты (ESD) и другие более мелкие системы управления (например, системы на программируемых логических контроллерах (PLC)). Как правило, АСУ ТП имеет единую систему операторского управления технологическим процессом в виде одного или нескольких пультов управления, средства обработки и архивирования информации о ходе процесса, типовые элементы автоматики: датчики, устройства управления, исполнительные устройства. Главной особенностью АСУ ТП является обязательное участие человека-оператора в ее работе. Роль оператора состоит в постоянном контроле за системой операторского управления.[1] Для информационной связи всех подсистем используются промышленные сети.
Распределённая система управления, РСУ (англ. Distributed Control System, DCS) — система управления технологическим процессом, отличающаяся построением распределённой системы ввода вывода и децентрализацией обработки данных.
Программируемый логический контроллер[править | править код]
Программи́руемый логи́ческий контро́ллер (ПЛК) (англ. Programmable Logic Controller, PLC) или программируемый контроллер — электронная составляющая промышленного контроллера, специализированного (компьютеризированного) устройства, используемого для автоматизации технологических процессов.
- ↑ А.В. Андрюшин, В.Р.Сабанин, Н.И.Смирнов.Управление и инноватика в теплоэнергетике. — М: МЭИ, 2011. — С. 15. — 392 с. — ISBN 978-5-38300539-2.
Вопрос№1. Обобщенная техническая структура типовой аср (автоматической системы регулирования)
Автоматическое регулирование — это одна из основных управляющих функций АСУТП.
Для технической реализации типовой АСР к объекту регулирования необходимо подключить комплекс технических средств, называемый регулятором. Регулятор позволяет реализовать заданный алгоритм управления. Чаще всего АР — это стабилизация технологического параметра на заданном уровне, компенсация отклонений регулируемой величины от заданного значения, возникающих вследствие действия различных возмущений.
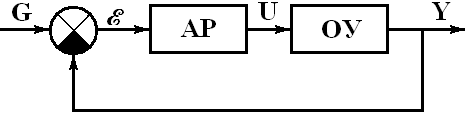
Структурная схема одноконтурной аср
Автоматические регуляторы классифицируются:
по назначению: температуры, давления, влажности;
по дополнительному источнику энергии: прямого и косвенного действия;
по виду дополнительного источника энергии: электрические, пневматические, гидравлические и комбинированные;
по форме выходного сигнала: непрерывные, дискретные и цифровые;
по закону регулирования: П-; И-; ПИ-; ПД-; ПИД- и позиционные.
Входной величиной регулятора является отклонение регулируемой величины от заданного значения ε.
Выходной величиной АР является регулирующее воздействие U.
Основные требования к измерительной, управляющей и исполнительной частям АСР.
В локальных САР также можно выделить измерительную часть, информационно-управляющую и исполнительную.
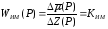
Измерительная часть состоит из первичных измерительных преобразователей (ПИП) и вторичных преобразователей. ПИП преобразуют параметр ТОУ в изменение энергетического потенциала сигнала-носителя информации. Вторичные ИП служат для согласования выхода датчика со входами управляющей части локальной САР. Например: усилители, делители, нормирующие преобразователи. Изменяют вид энергии сигнала носителя (из пневматического в электрический) и вид сигнала (аналог-цифра).
Управляющая часть может состоять из одного или нескольких блоков, реализующих требуемый алгоритм регулирования. В типовые алгоритмы чаще всего входят операции статического и динамического преобразования информации (усиление, алгебраическое суммирование, интегрирование, дифференцирование, нелинейное и логическое преобразование).
В состав исполнительной части типовой локальной САР обычно входят ИМ и согласующие устройства (усилители мощности, пускатели).
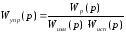
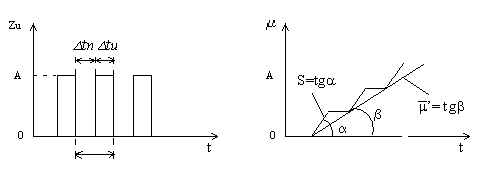
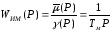
Динамика регулятора определяется алгоритмом управления с одной стороны и технической структурой измерительной и исполнительной части с другой.
 ,
,
следовательно
Для удобства эксплуатации к АР предъявляют дополнительные требования:
безударное переключение при переходе с ДУ на автоматическое; или с внешнего задающего устройства на внутреннее;
ограничение командного аналогового сигнала по верхнему и нижнему уровням и сигнализация об этом;
гальваническое разделение входных и выходных цепей АР;
автоматическое изменение параметров настройки АР для реализации адаптивного регулирования.
Вопрос№2,15. Динамические характеристики исполнительного механизма постоянной скорости
Исполнительный
мембранный механизм может быть представлен
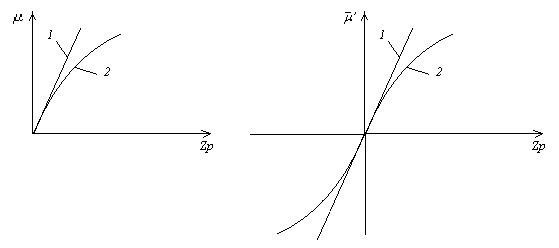
как звено с нелинейной статической
характеристикой (рис.7, а). Его характеристика
находится в прямой зависимости от
площади мембраны и в обратной – от
коэффициента жесткости пружины
(возрастающей по мере ее сжатия).
Соответственно, при малых изменениях  динамическую характеристику мембранного
исполнительного механизма можно
представить пропорциональным звеном
динамическую характеристику мембранного
исполнительного механизма можно
представить пропорциональным звеном
 , (1)
, (1)
причем
коэффициент передачи  несколько
убывает с ростом
несколько
убывает с ростом  .
.
а б
Рис.7. Статические характеристики мембранного (а)
и гидравлического (б) исполнительных механизмов:
1 – идеальная; 2 – реальная
Гидравлический исполнительный механизм может рассматриваться как звено с нелинейной статической характеристикой (рис.7, б). Это связано с возрастанием постоянной интегрирования реального исполнительного механизма при больших скоростях перемещения поршня (за счет резкого увеличения сил вязкого трения).
Динамика гидравлического исполнительного механизма при малых входных воздействиях может быть представлена линейным интегрирующим звеном
 .
(2)
.
(2)
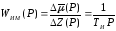
Исполнительный механизм постоянной скорости может находиться только в трех установившихся состояниях: вращение ротора с постоянной скоростью S, неподвижность, вращение с той же скоростью в противоположную сторону. Статическая характеристика исполнительного механизма постоянной скорости представлена на рис.8.
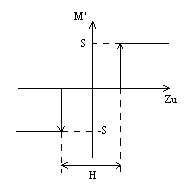
Рис.8. Статическая характеристика исполнительного механизма
постоянной скорости
При превышении сигнала управления Zu половины зоны нечувствительности H/2 происходит включение электродвигателя, который начинает перемещать с постоянной скоростью S вал исполнительного механизма.
Пусть на вход исполнительного механизма постоянной скорости поступает импульсный управляющий сигнал (рис.9, а) с амплитудой (0, А), при этом носителем информации является скважность импульсов , поступающих с периодом Т=tи+tп:
 , (3)
, (3)
где tи – время импульса; tп – время паузы.
Тогда
реакция исполнительного механизма
постоянной скорости на импульсное
воздействие будет иметь вид, представленный
на рис.9, б. Можно записать следующее
равенство:  ,,
тогда средняя скорость движения
,,
тогда средняя скорость движения будет связана со скважностью следующим
соотношением:
будет связана со скважностью следующим
соотношением:
 . (4)
. (4)
а б
Рис.9. Динамическая характеристика исполнительного механизма постоянной скорости
Таким образом, по отношению к скважности импульсного сигнала исполнительный механизм постоянной скорости ведет себя в среднем как интегрирующее звено, и его передаточную функцию можно представить в следующем виде:
 . (5)
. (5)
Если принять перемещение исполнительного механизма от 0 до 1, тогда скорость запишется как
 , (6)
, (6)
Тм – время полного хода ИМ, с.
Тогда передаточная функция ИМ примет следующий вид
1.2.3. Система автоматической защиты
Система автоматической защиты (САЗ) предназначена для своевременного отключения энергетической установки или отдельных ее устройств при достижении каким-либо контролируемым параметром предельно допустимой величины , способной вызвать аварийную ситуацию .
Функциональная схема САЗ приведена на рис.1.3. Система включает в себя защитное устройство (сигнализатор),исполнительный орган ПО с деблокирующим элементом ДЭ и объектов защиты ОБ
ДЭ
Р 




У
З





ОБ
ИО
Р ЭС x у 




Д

 Сигнализатор
Сигнализатор

Рис. 1.3. Функциональная схема системы автоматической защиты
Системы автоматической защиты подразделяются на системы однократного действия с разовым деблокированием и повторного действия
В системах однократного действия исполнительный орган ИО после срабатывания защиты автоматически удерживается в отключенном состоянии не зависимо от последующего состояния контролируемого параметра у. Для возврата системы защиты в рабочее положение оператор вручную воздействует на деблокирующий элемент.
В системе повторного действия исполнительный орган ИО не имеет удерживающего элемента ДЭ, что исключает использование деблокирующего элемента ДЭ. Система самостоятельно возвращается в рабочее состояние после возвращения контролируемого параметра в допустимые (заданные ) пределы .
1.2.4. Автоматическая система регулирования
Автоматические системы регулирования (АСР) предназначены поддерживать указанные параметры в необходимых пределах, обеспечивая тем самым сохранение нормального технологического режима установки, либо изменять эти параметры по какому либо алгоритму в соответствии с законной программой.
Упрощенная схема автоматической системы регулирования, изображенная на рис. 1.4, представляет собой совокупность объекта регулирования ОР и автоматического регулятора АР. осуществляющего управление техническими средствами для поддержания заданных параметров объекта регулирования .
Объект регулирования ОР — это агрегат или механизм, в котором протекает технологический процесс, подлежащий регулированию.
……
Рис. 1.4. Функциональная схема автоматической системы регулирования
Пояснение. Автоматический регулятор (АР) – это устройство, автоматически поддерживающее постоянным заданное значение регулируемой величины при изменяющихся внешних воздействиях F1…Fn, или изменяющее эту величину по какому-либо алгоритму (закону).
Автоматический регулятор воспринимает отклонения текущего значения регулируемой величины yтек =У от заданного значения yзад и вырабатывает по определенному закону управляющий сигнал U с целью изменения регулирующего воздействия x для ликвидации этого отклонения.
Регулируемая величина у – это физическая величина объекта регулирования, которую необходимо регулировать, т.е. изменять, по какому-либо закону или поддерживать постоянной на заданном значении. Чаще всего это частота вращения вала двигателя, температура, давление и уровень среды и т.п.
Входное (регулирующее) воздействие Х – это рабочее вещество или энергия, посредством которых осуществляется изменение регулируемой величины У. В качестве этого параметра могут выступать охлаждающая вода в конденсатор, расход холодильного агента на испаритель и т.д.
Возмущающие воздействия F1…Fn– это внешние факторы, способные отклонить регулируемую величину у от заданного значения. За такие воздействия принимаются теплопритоки в холодильную камеру, расход пара из парового котла и т.п.
Пример. Рассмотрим автоматическую систему регулирования уровня воды в барабане парового котла. Технологическая схема такой системы приведена на рис.1.5.
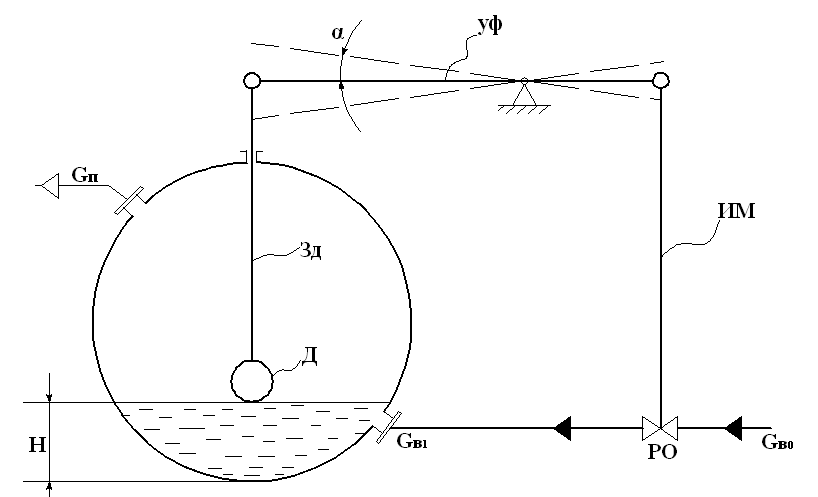
Рис.1.5. Технологическая схема регулирования уровня воды
в барабане парового котла
Объектом регулирования в данной системе является барабан парового котла.
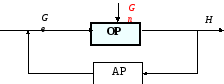 Представим
обобщенную технологическую схему,
приведенную на рис. 1.5, в виде функциональной
схемы автоматической системы регулирования,
изображенной на рис.1.6.
Представим
обобщенную технологическую схему,
приведенную на рис. 1.5, в виде функциональной
схемы автоматической системы регулирования,
изображенной на рис.1.6.
Рисунок 1.6. Обобщенная функциональная схема АСР уровня воды
в барабане парового котла
Регулируемой величиной является уровень воды Н в паровом котле, регулирующим воздействием – расход воды Gв в паровой котел и возмущающим воздействием – расход пара Gп отводимый от котла и оказывающий основное влияние на уровень воды (регулируемый параметр Н). Наиболее развернутая функциональная схема системы регулирования, с обозначением ее элементов, представлена на рис. 1.7.
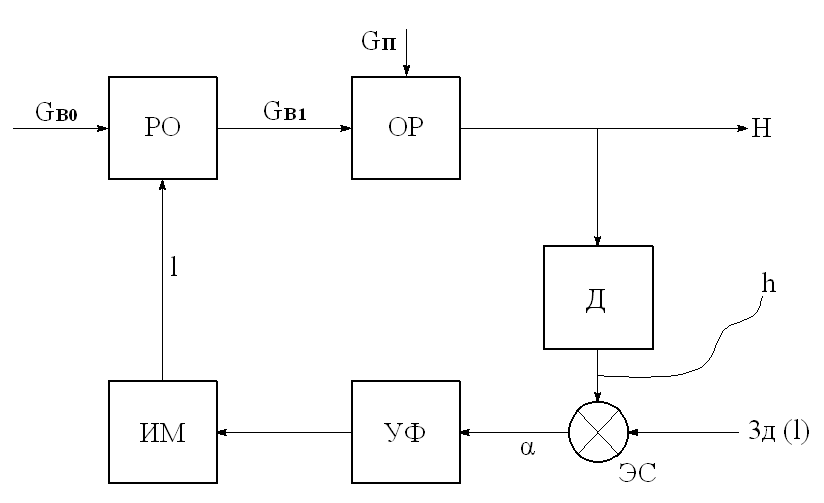
Рисунок 1.7. Развернутая функциональная схема системы регулирования
уровня воды в барабане парового котла